

Aula 1:
Introdução à disciplina de Controle Digital
SEL0359
8 de agosto de 2024

- Slides;
- Notas de aula;
- Listas de exercícios;
- Vídeos relacionados aos tópicos;
- Códigos, exemplos ilustrativos, etc...
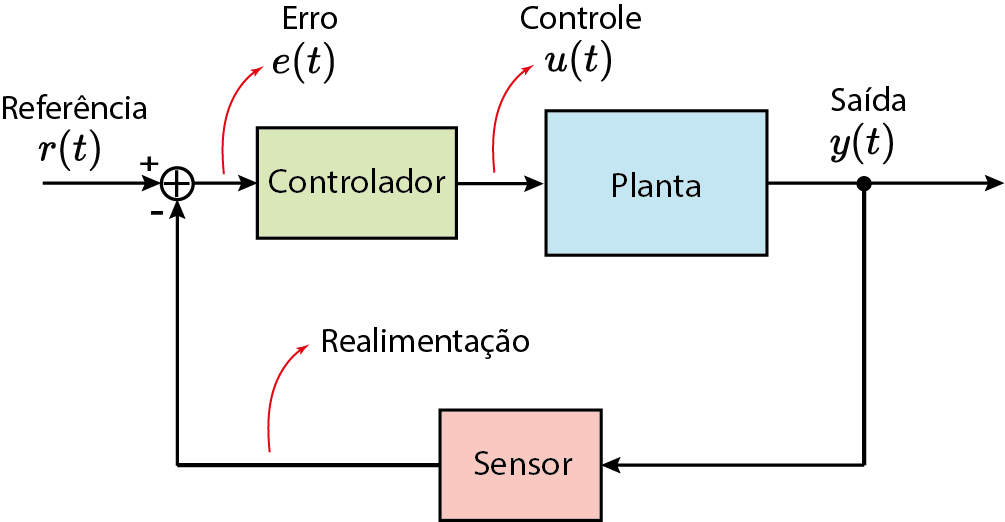
O que é um sistema de controle?
Garantir desempenho e segurança!
Naves espaciais e aviões
 |  |
Ex: controle de atitude
Rocket Landing System
Geração de energia
 |
Ex: controle de potência gerada
Indústria
 |  |
Ex: controle de temperatura, vazão, nível...
Setor automotivo
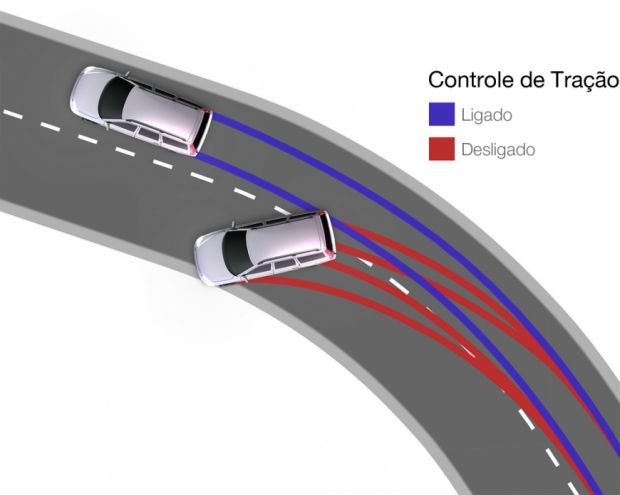 Fonte: https://salaodocarro.com.br/como-funciona/controle-de-tracao.html |  |
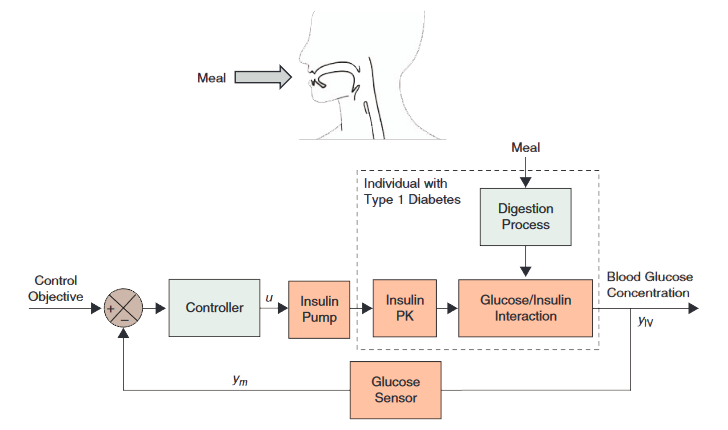
Medicina (Ex: Controle de Diabetes)
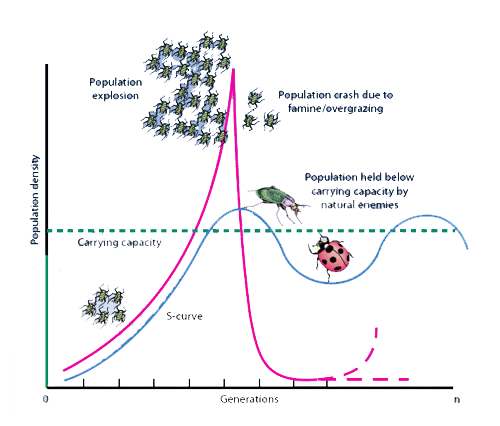
Biologia (Ex: Controle de Populações)
Tomada de decisão no Mercado financeiro e Economia
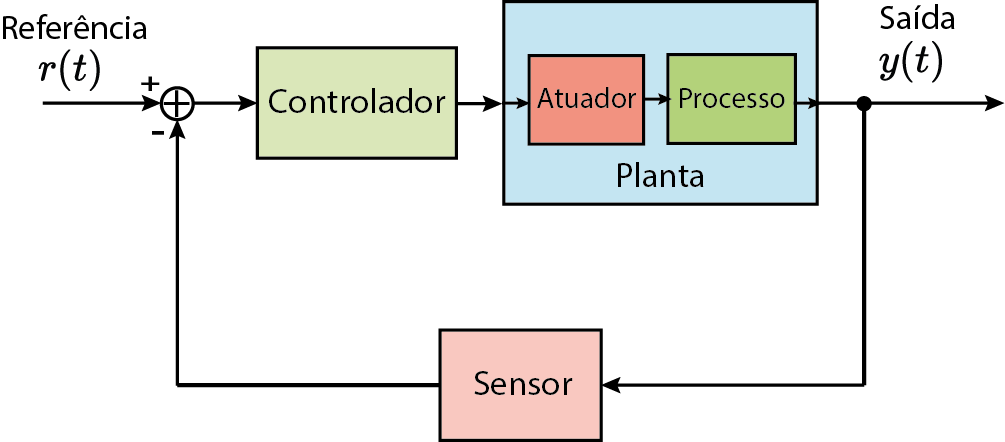
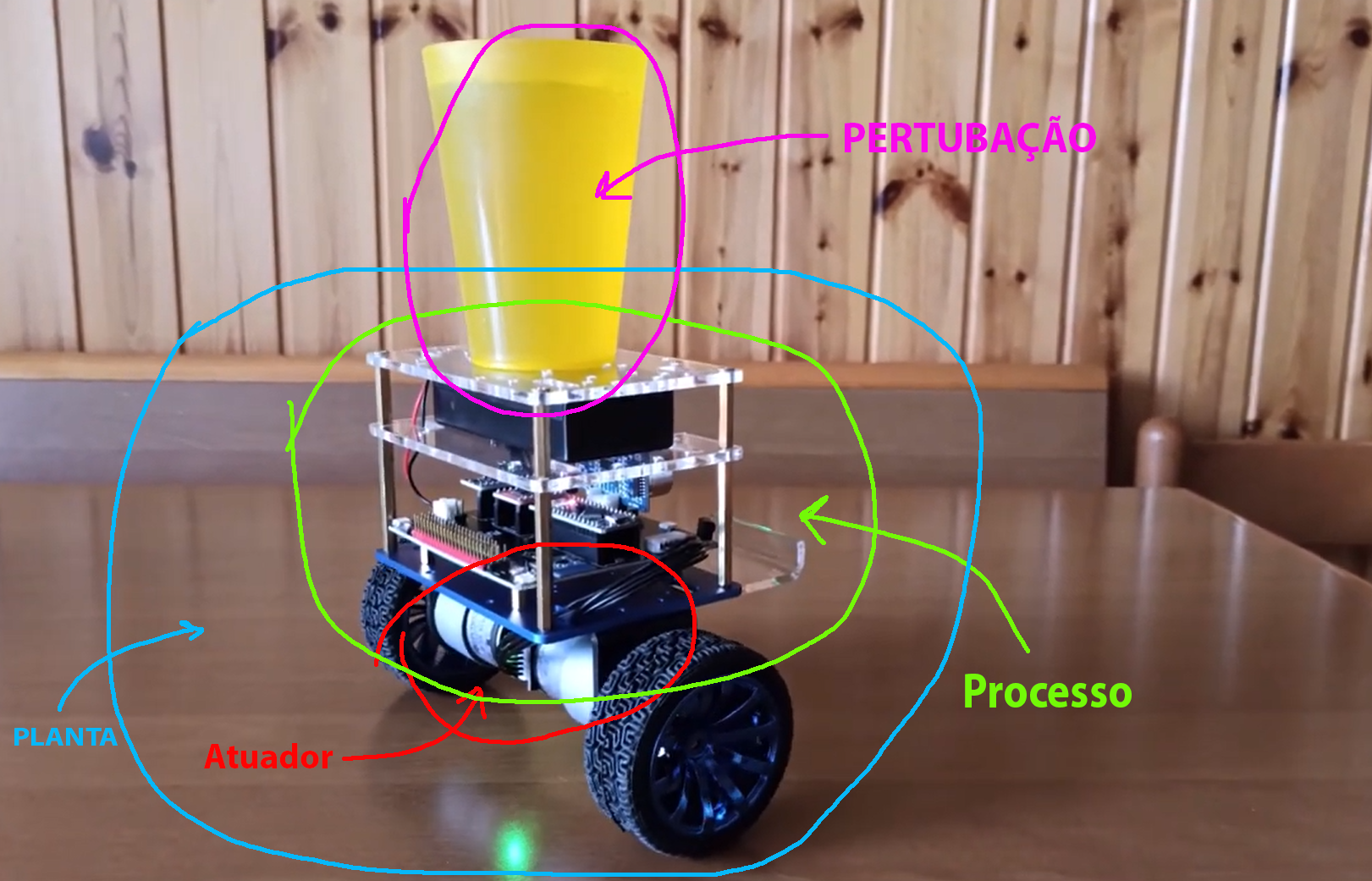
Processo pode ser físico ou não-físico.
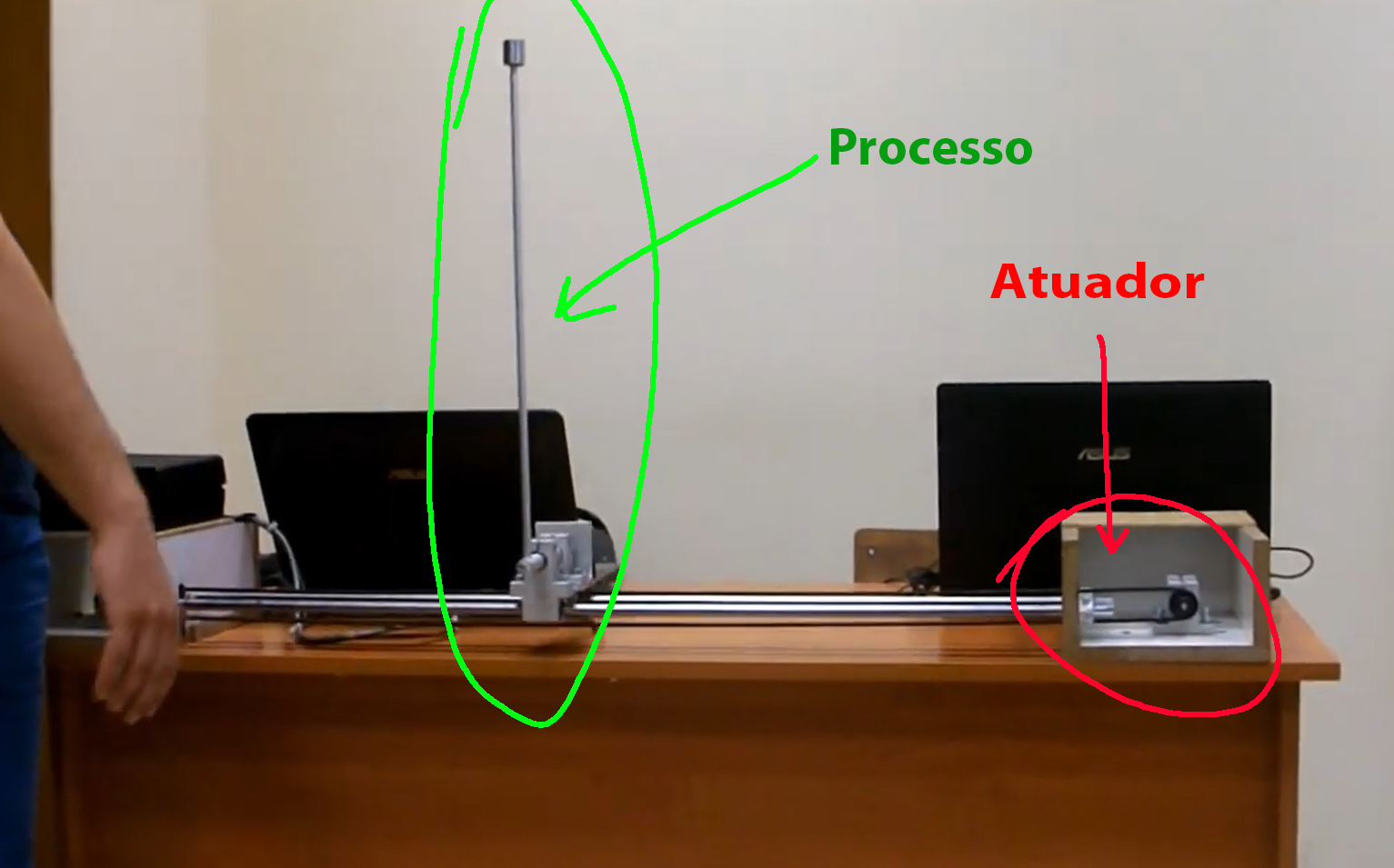
Pêndulo Invertido:
https://www.youtube.com/watch?v=4kIrcELC79o
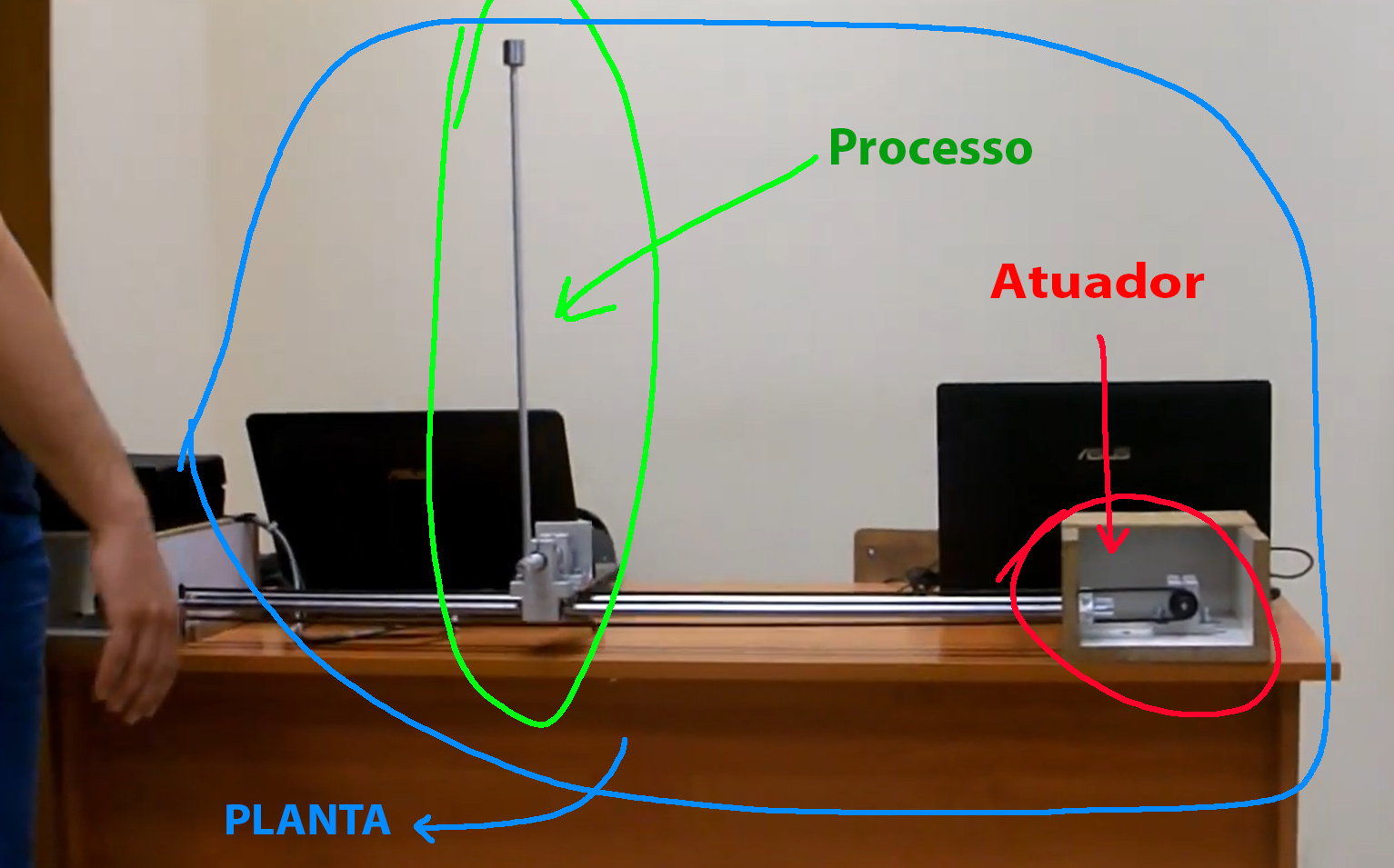
Pêndulo Invertido:
https://www.youtube.com/watch?v=4kIrcELC79o

Pêndulo Invertido:
https://www.youtube.com/watch?v=4kIrcELC79o
Pêndulo Invertido:
https://www.youtube.com/watch?v=4kIrcELC79o
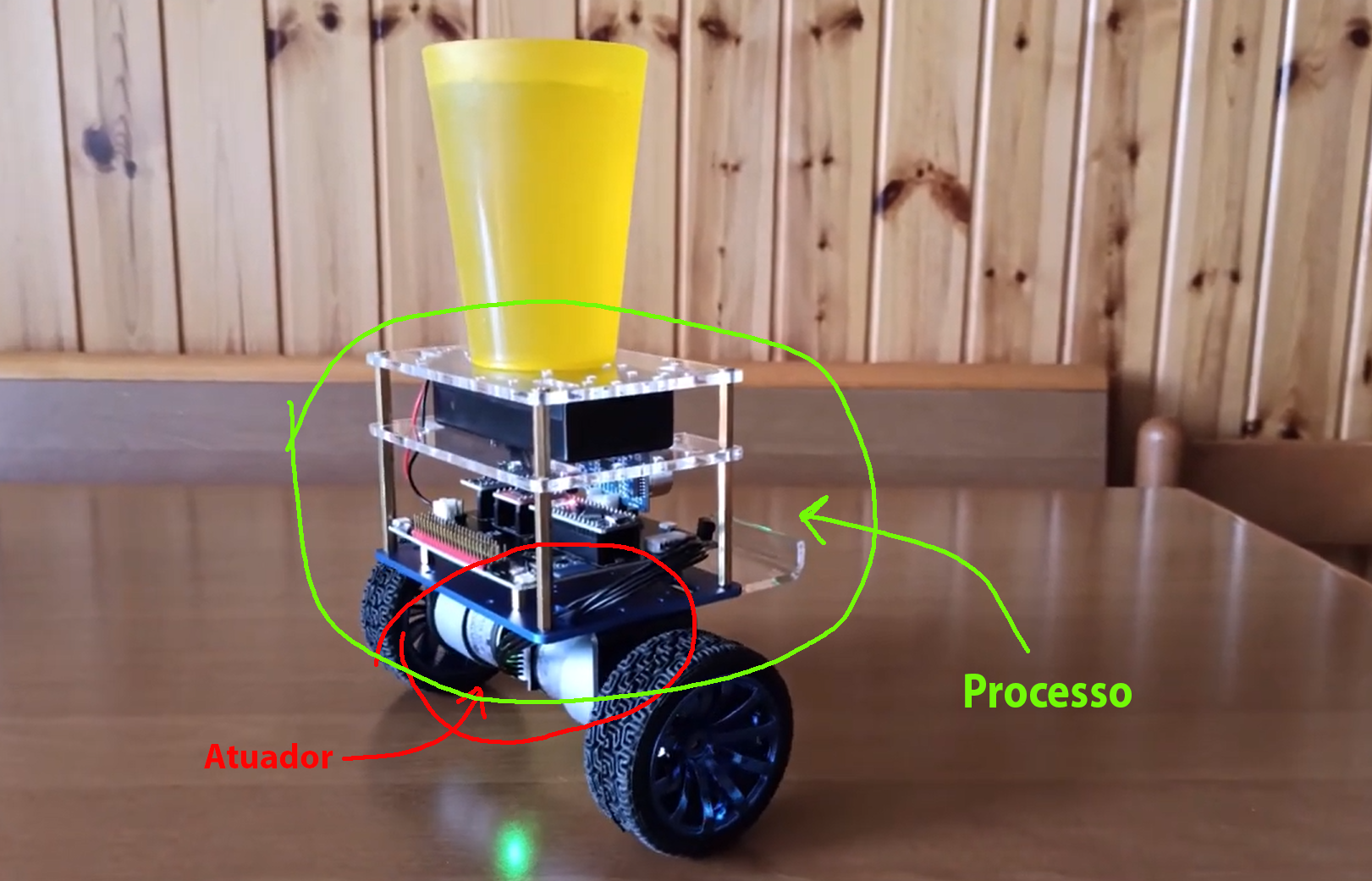
Self-balanced robot:
https://www.youtube.com/watch?v=38KVxZnBDZc
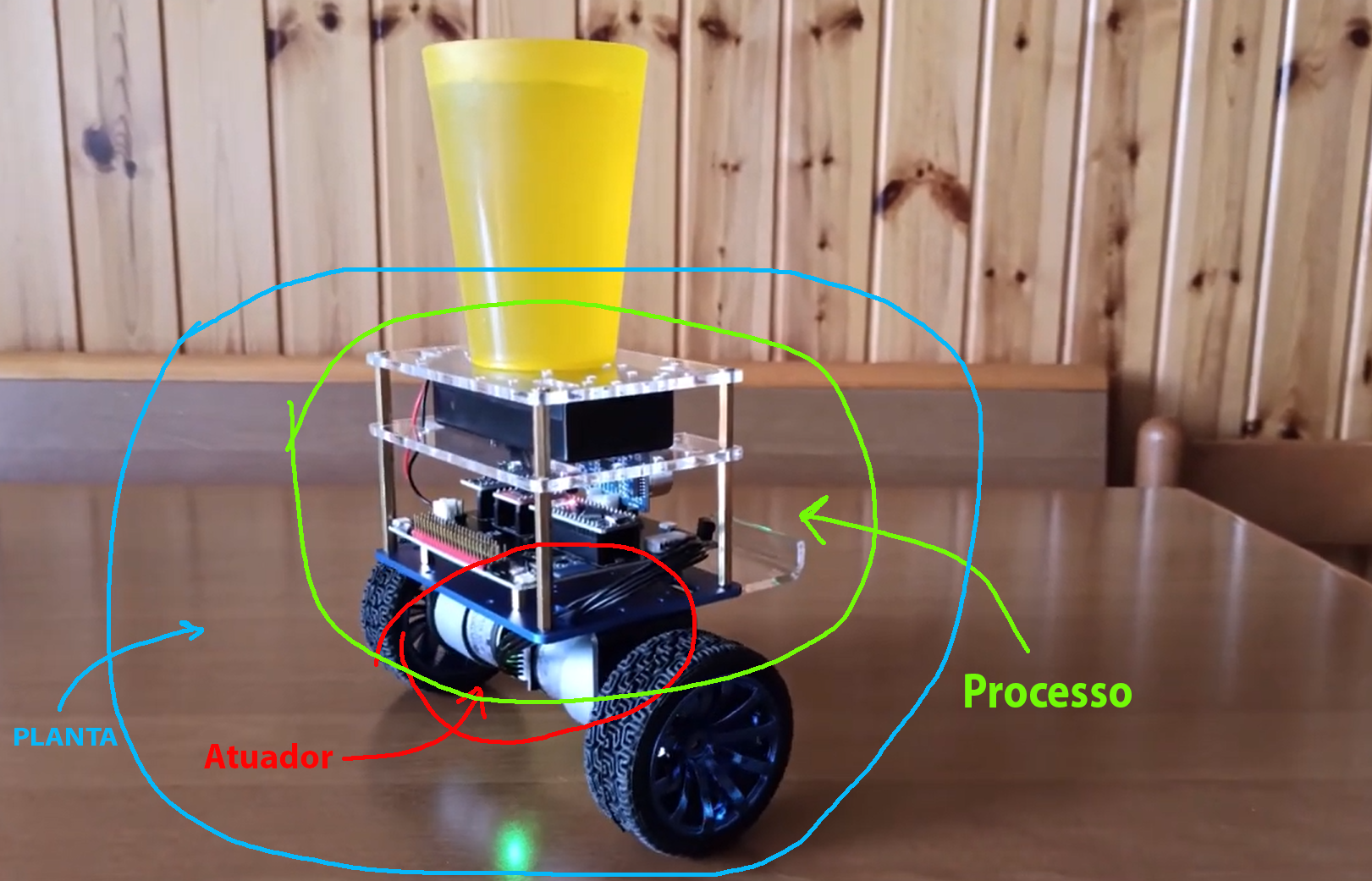
Self-balanced robot:
https://www.youtube.com/watch?v=38KVxZnBDZc

Self-balanced robot:
https://www.youtube.com/watch?v=38KVxZnBDZc

Self-balanced robot:
https://www.youtube.com/watch?v=38KVxZnBDZc
Self-balanced robot:
https://www.youtube.com/watch?v=38KVxZnBDZc
Self-balanced robot:
https://www.youtube.com/watch?v=38KVxZnBDZc
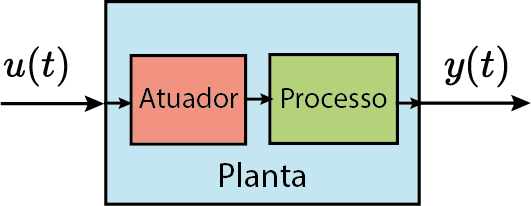
Obter Equações Diferênciais que descrevam a planta:
$$\sum_{n=0}^N \alpha_n\frac{d^n y}{dt^n}=\sum_{m=0}^M \beta_m\frac{d^m u}{dt^m}$$
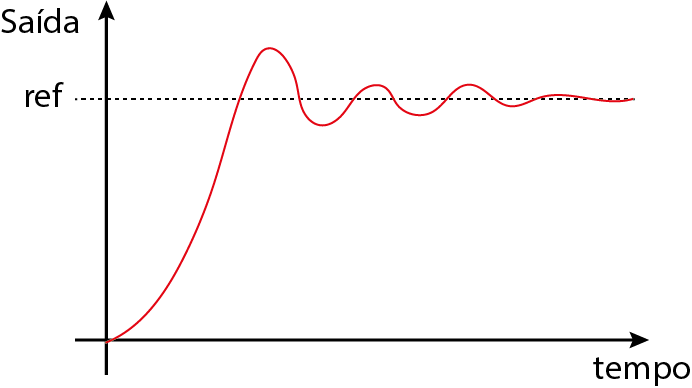
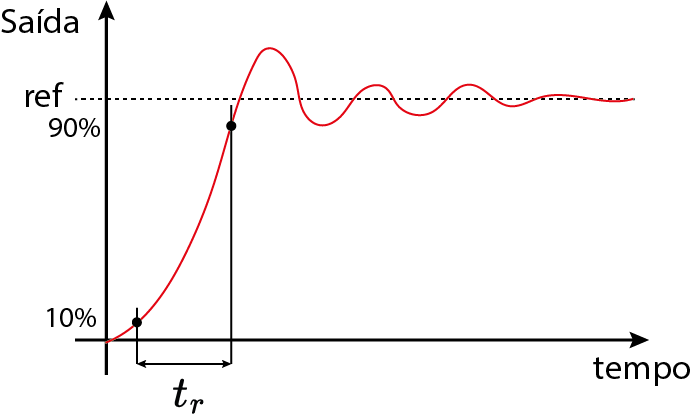
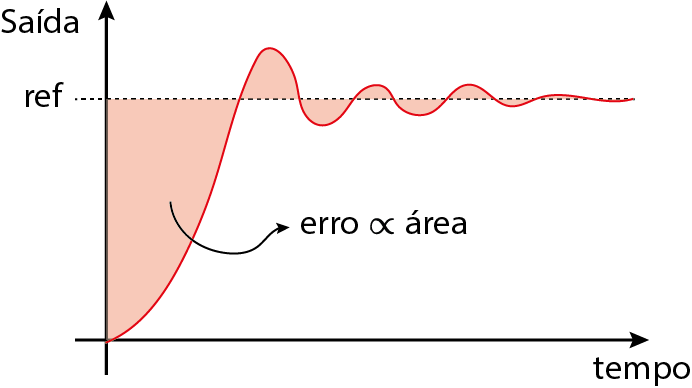
Tempo de subida $(t_r)$
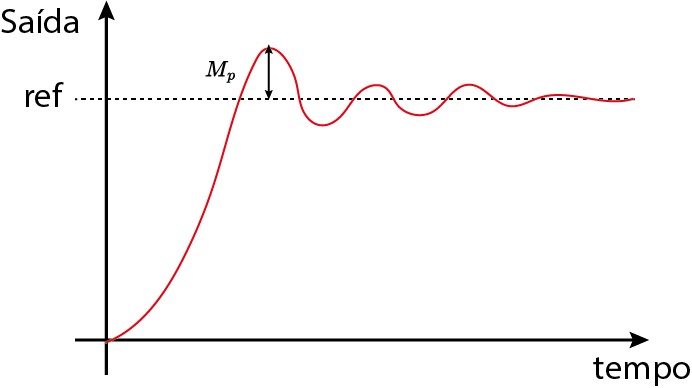
Sobresinal $(M_p)$
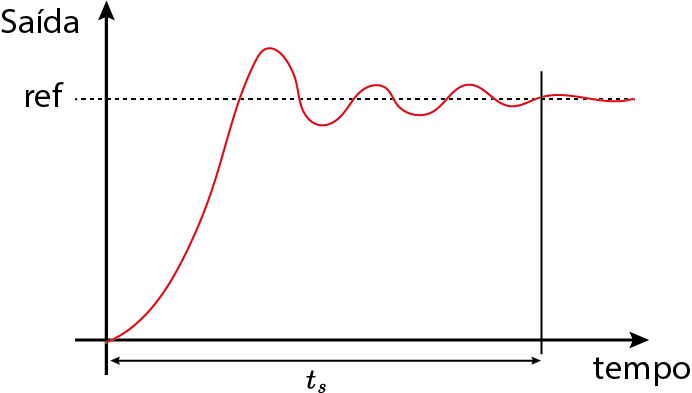
Tempo de acomodação $(t_s)$
Erro $(\epsilon)$
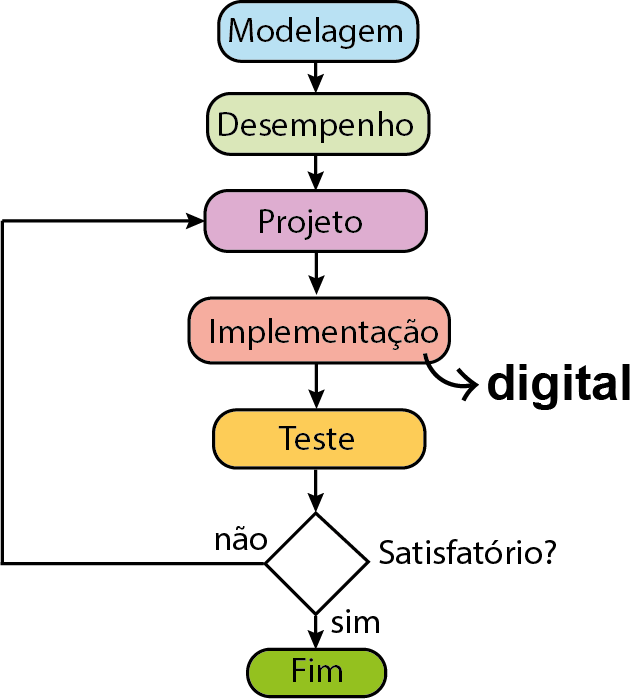
Analógico vs Digital
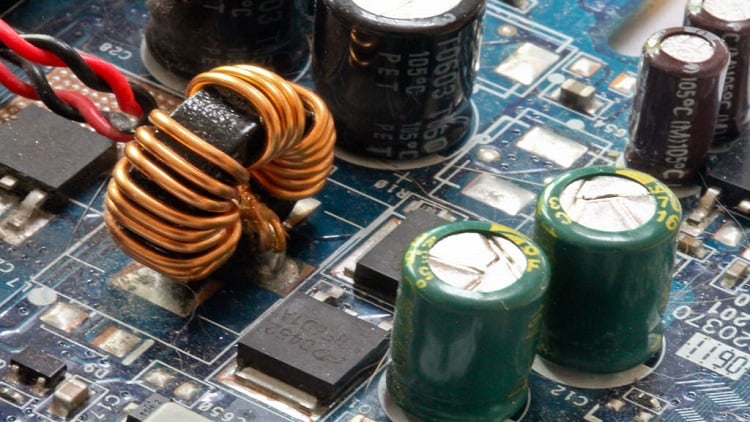 | 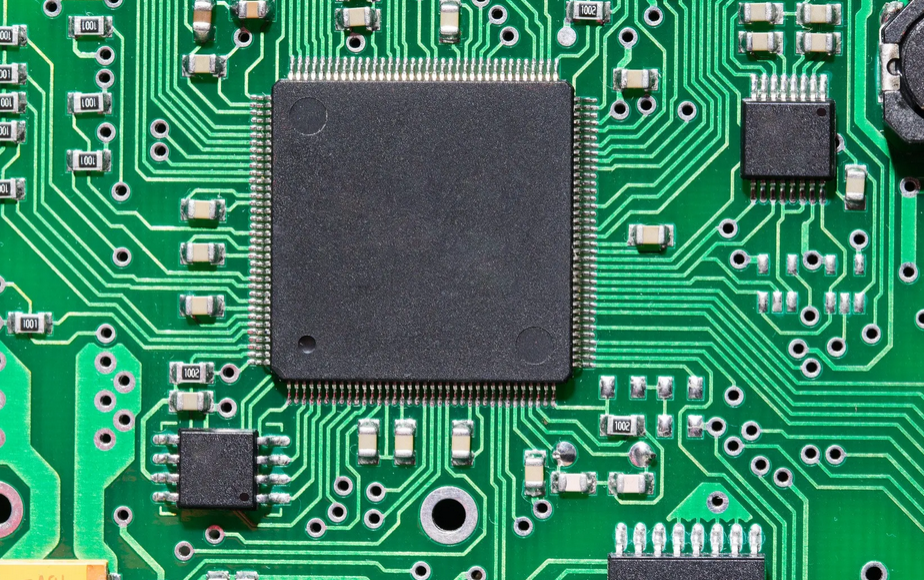 |
| Resistores, capacitores, indutores e OpAmp. | Computador digital ($\mu C$) |
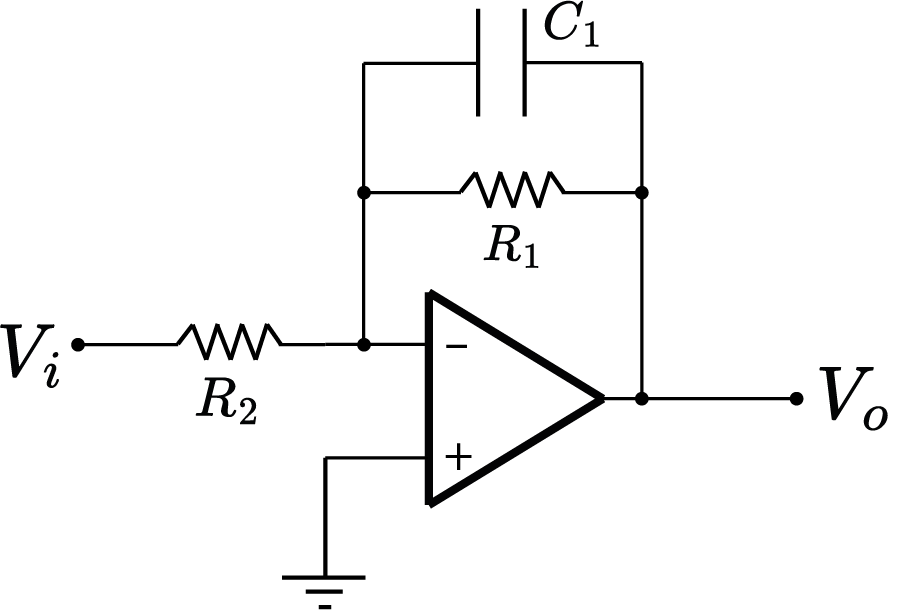 $$
\frac{V_o}{V_i}=-\frac{R_1}{R_2}\frac{\frac{1}{R_1C_1}}{s+\frac{1}{R_1C_1}}
$$
$$
\frac{V_o}{V_i}=-\frac{R_1}{R_2}\frac{\frac{1}{R_1C_1}}{s+\frac{1}{R_1C_1}}
$$
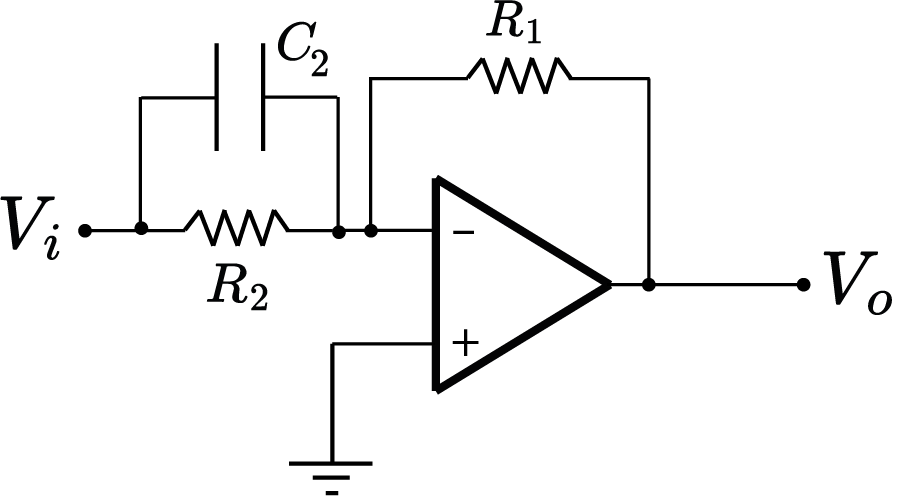 $$
\frac{V_o}{V_i}=-R_1C_2(s+\frac{1}{R_2C_2})
$$
$$
\frac{V_o}{V_i}=-R_1C_2(s+\frac{1}{R_2C_2})
$$
Analógico vs Digital
 | |
| Resistores, capacitores, indutores e OpAmp. | Computador digital ($\mu C$) |
Computador digital ($\mu C$)
Vantagens:
|
|
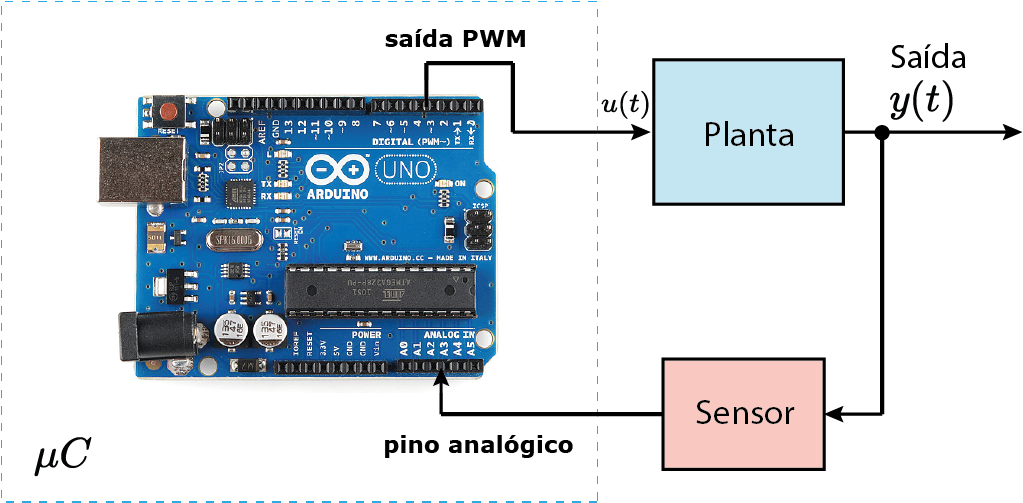
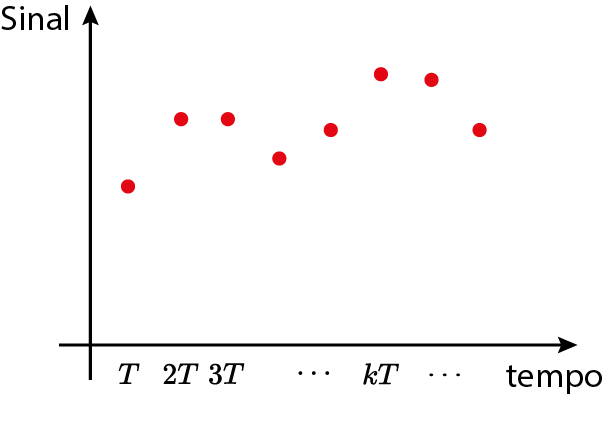
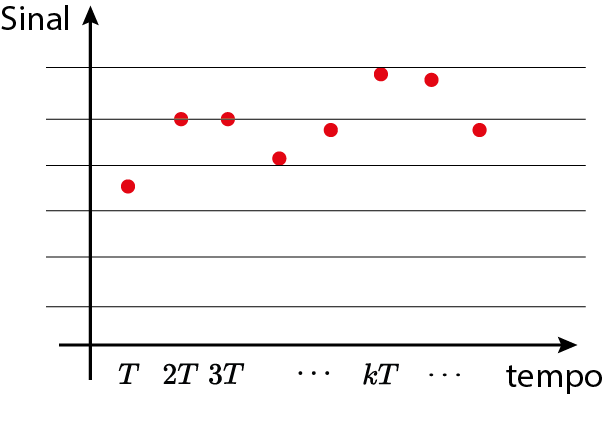
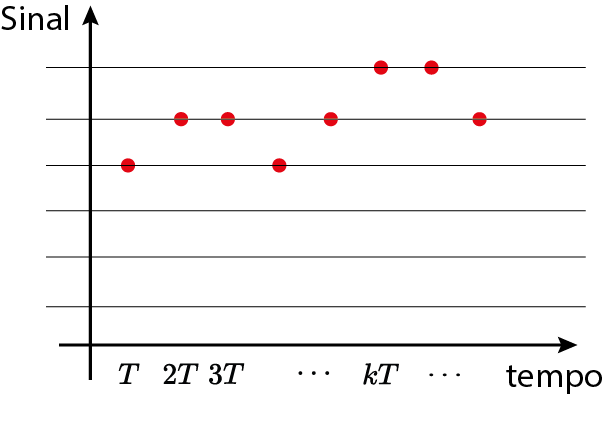
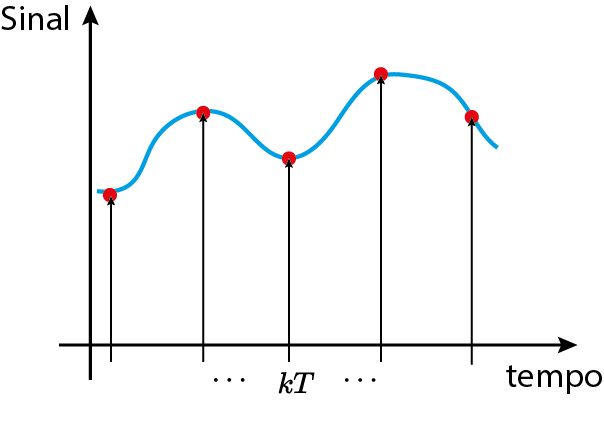
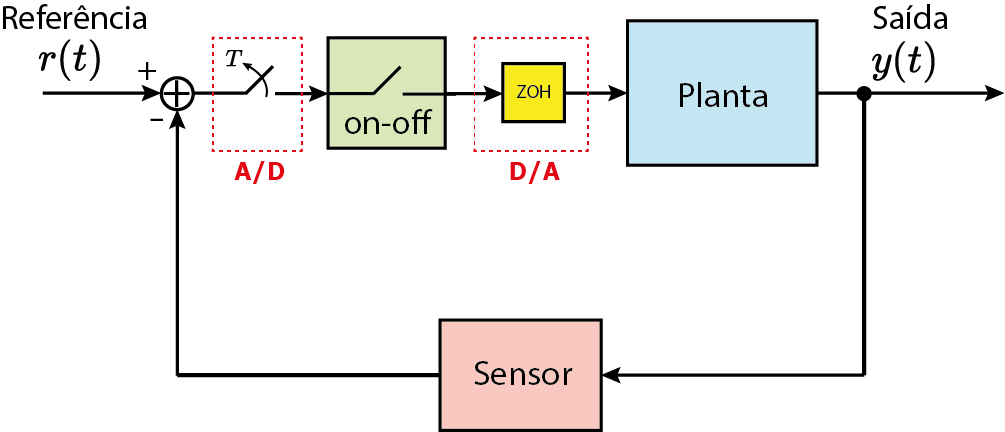
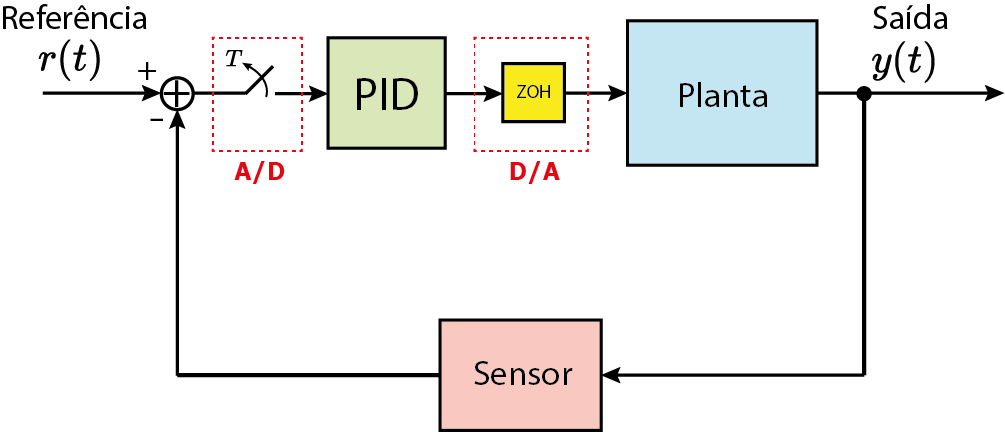
Interface analógica/digital
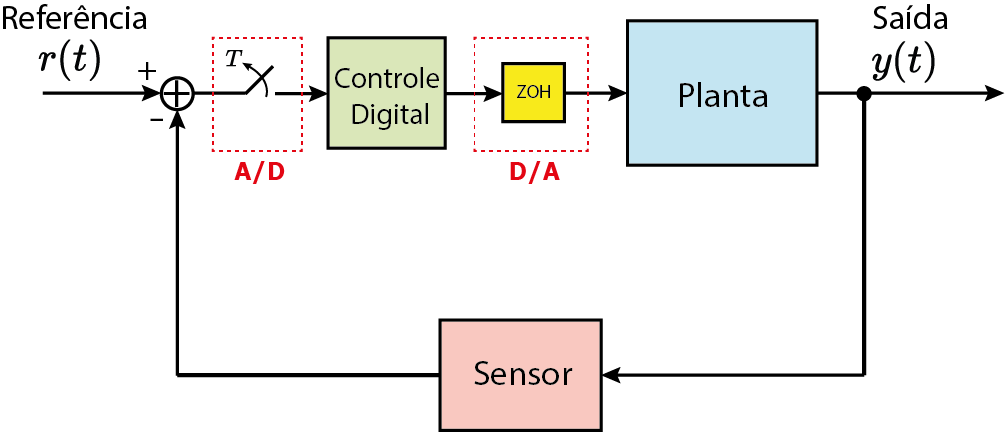
Interface analógica/digital
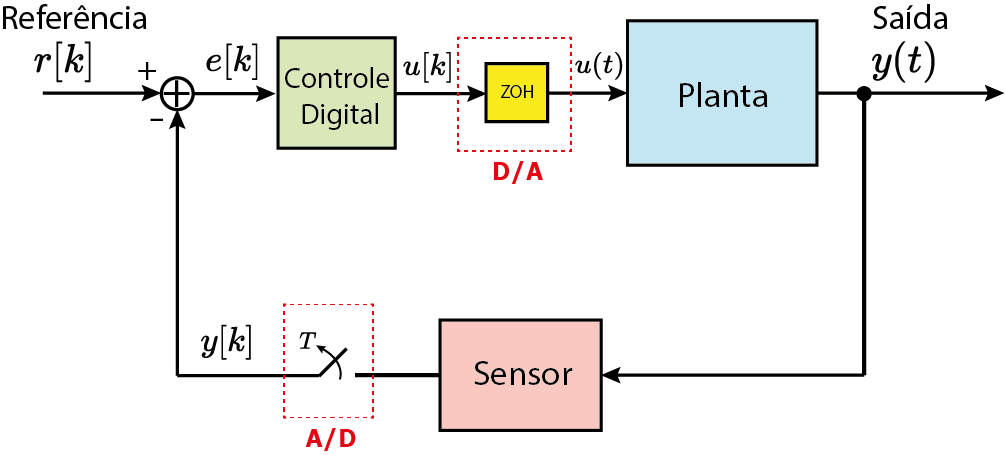
Interface analógica/digital
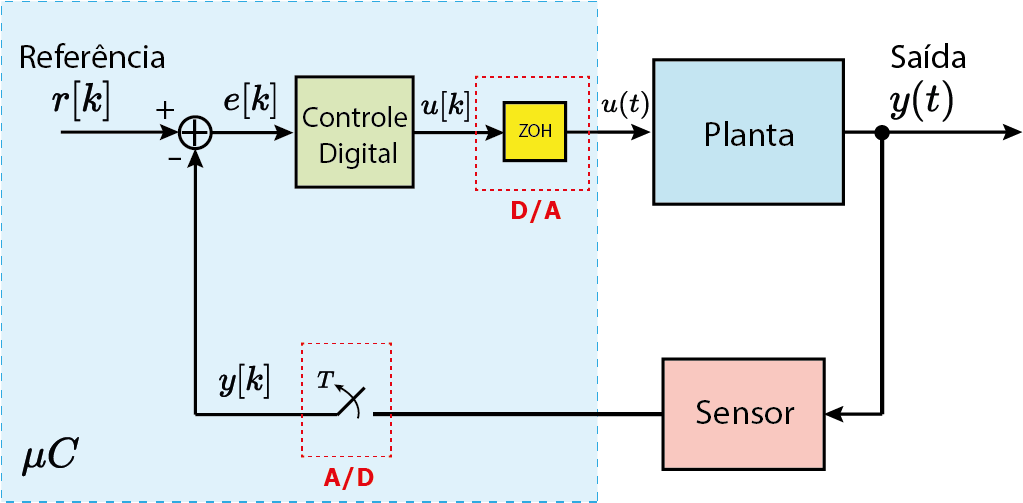
Interface analógica/digital
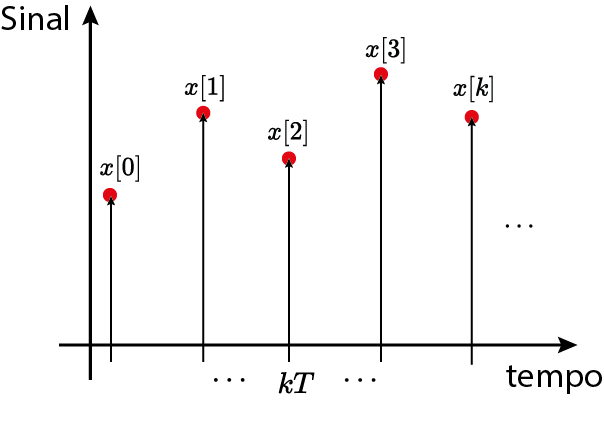
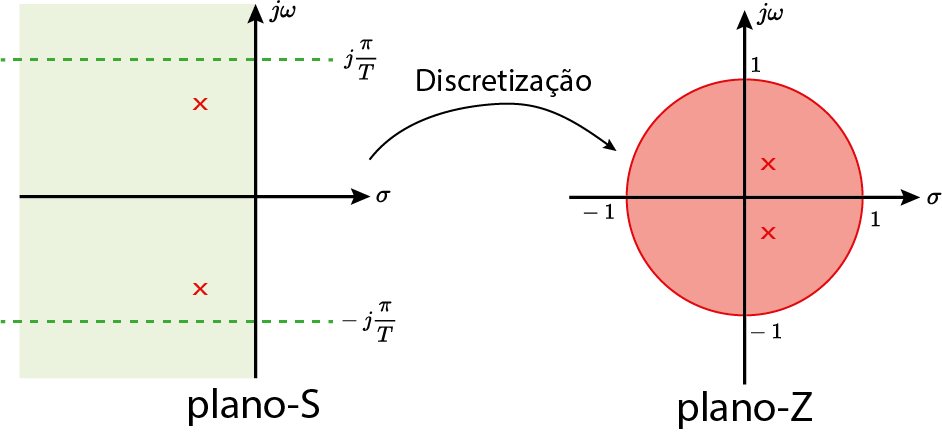
Transformada Z
$$X(z)=\sum_{k=-\infty}^\infty x[k]z^{-k}$$$$y_k=y[k-1]+y[k-2]$$ com $$ \begin{cases} y[0]=0\\ y[1]=1 \end{cases} $$

- Simulações computacionais;
- Direto na planta (de forma segura);
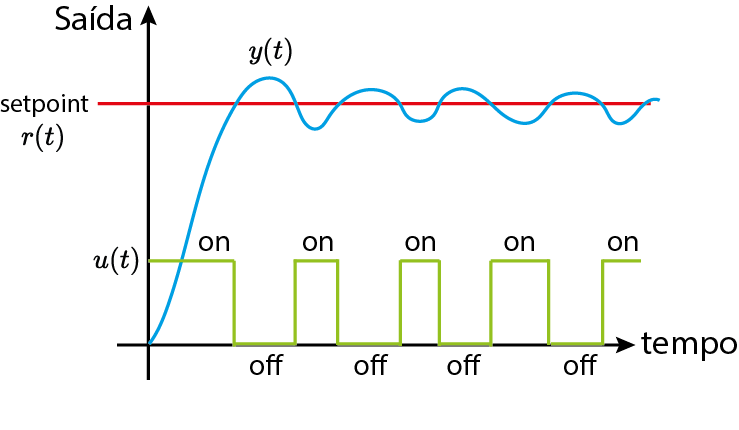
On-off
Utilizado em geladeiras, ar-condicionados, caixas de água etc
On-off
PID
PID (tempo contínuo)
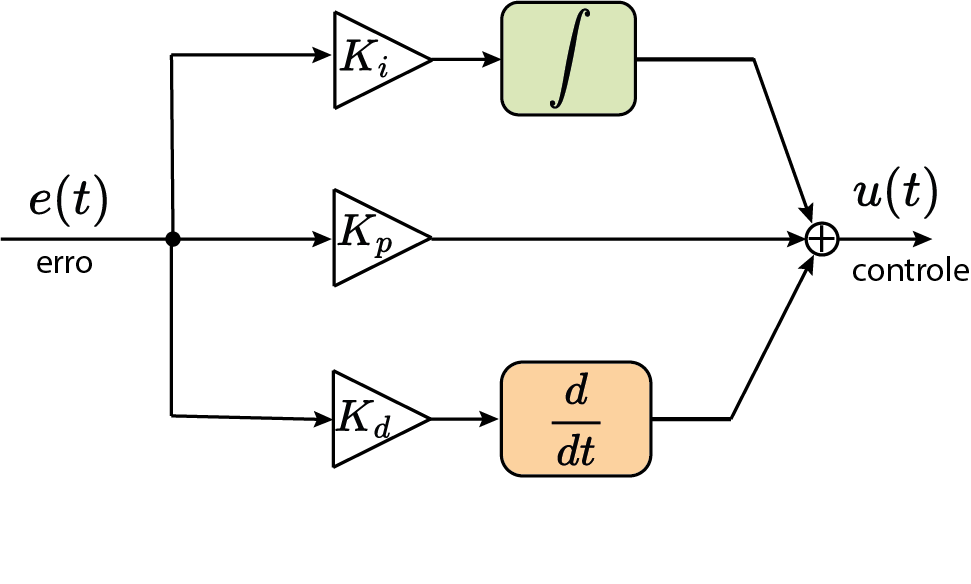
$C(s)=K_p+K_i\frac{1}{s}+K_ds$
PID (tempo discreto)
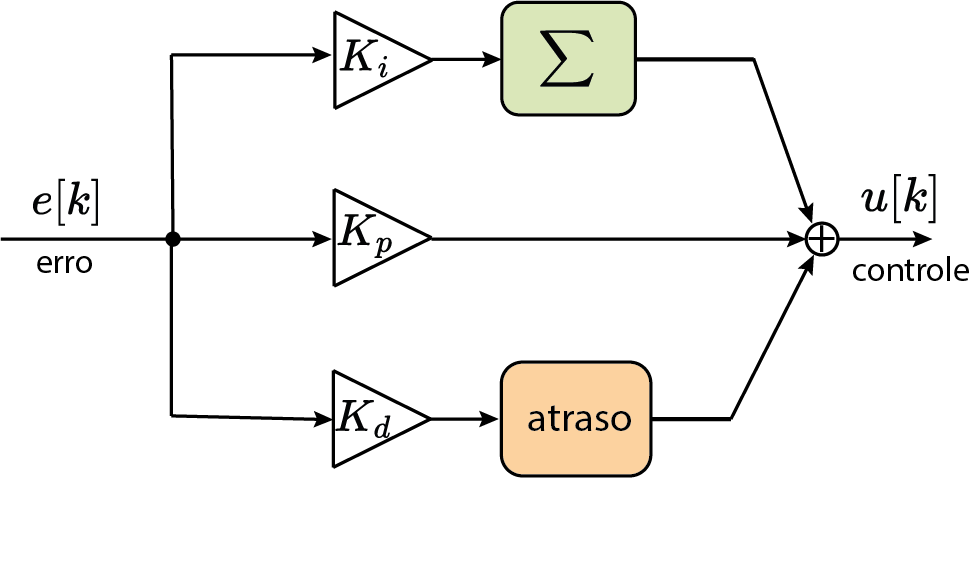
$C(z)=K_p+K_i\frac{1}{1-z^{-1}}+K_d(1-z^{-1})$
Realimentação de estados
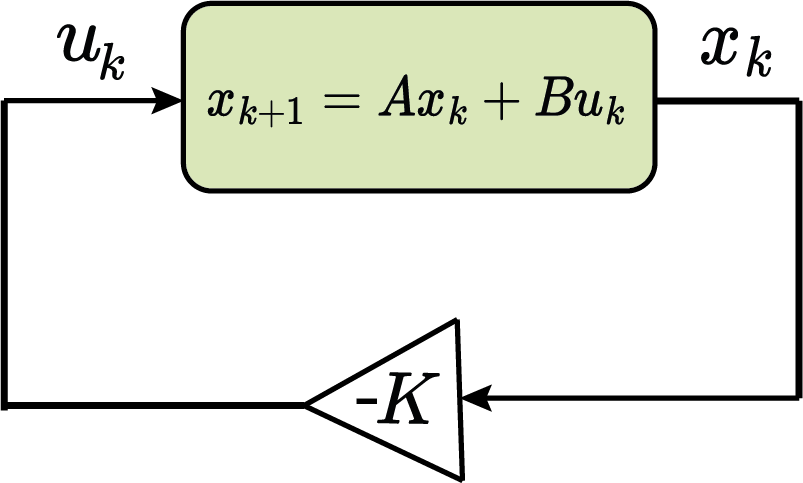
Controle ótimo: LQR
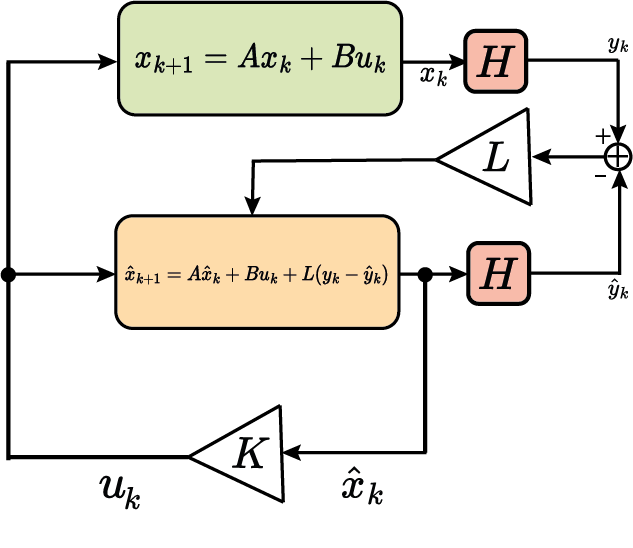
Observador ótimo: Filtro de Kalman
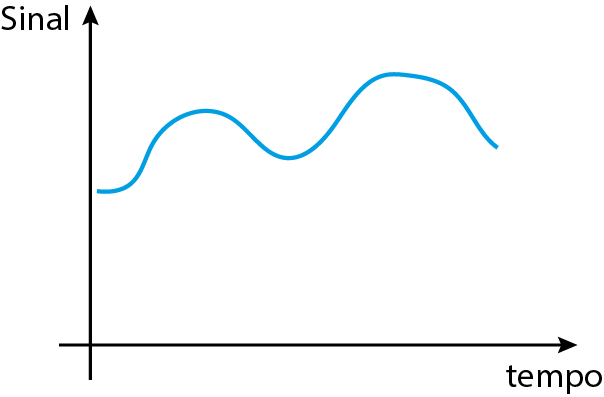
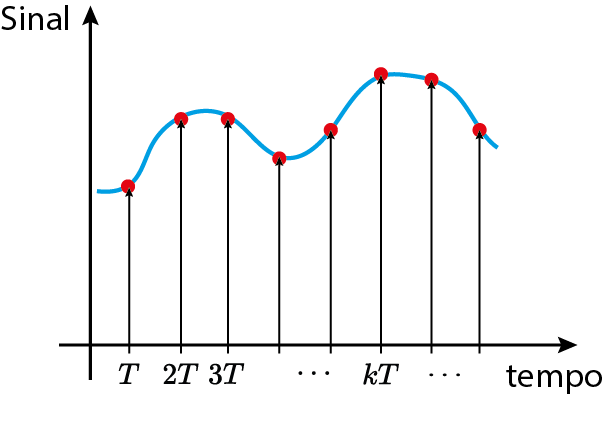
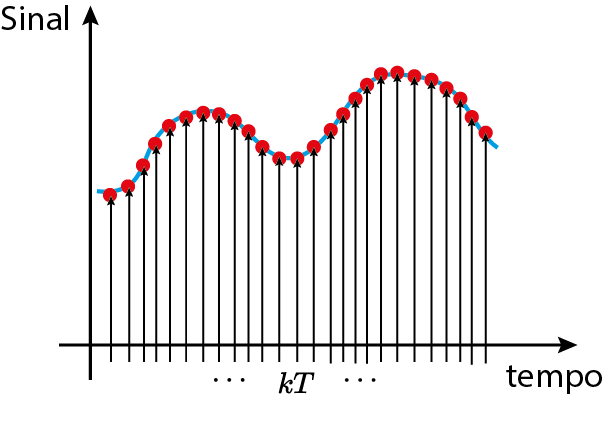
Teorema da amostragem