

Aula 21:
Diagrama de Bode para SLIT
SEL0604
18 de novembro de 2024
Forma geral: $$ G(s)=\frac{Y(s)}{X(s)}=\frac{s^m+\cdots+b_{m-1}s+ b_m}{s^n+\cdots+a_{n-1}s+a_n} $$
Forma ZPK: $$ G(s)=K\frac{s+b}{s+a}\frac{(s+z)(s+z^*)}{(s+p)(s+p^*)} $$
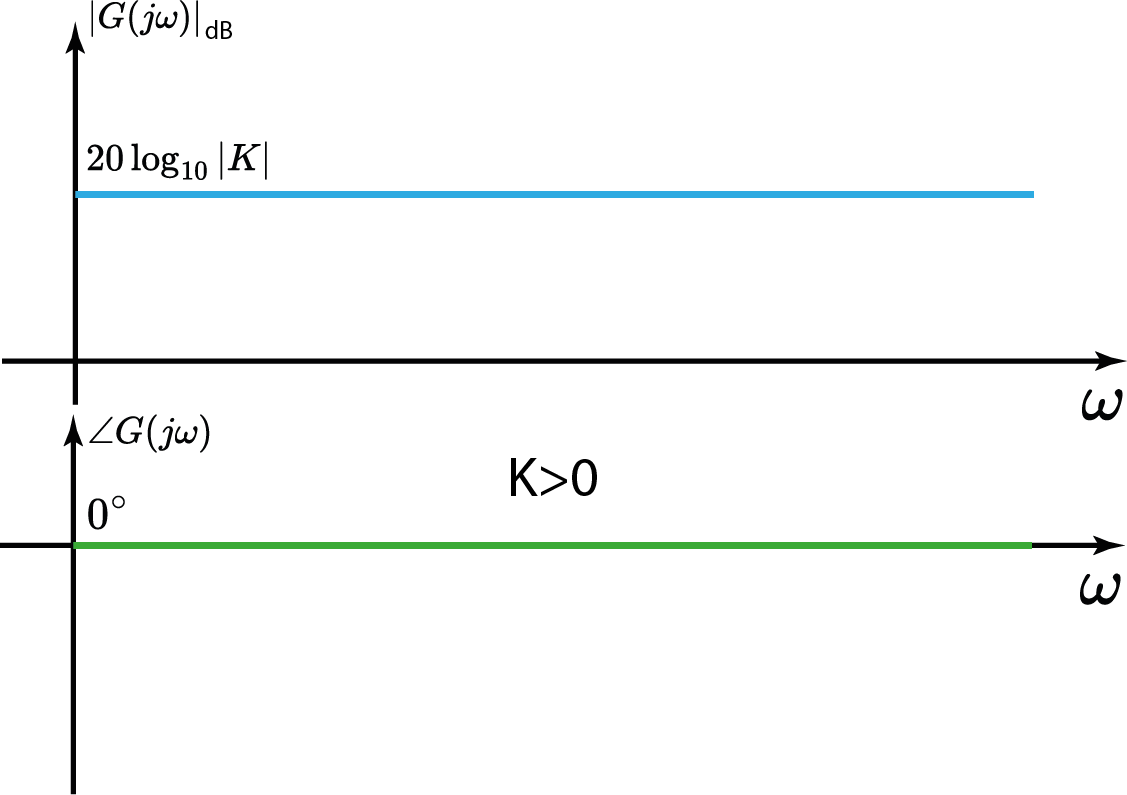
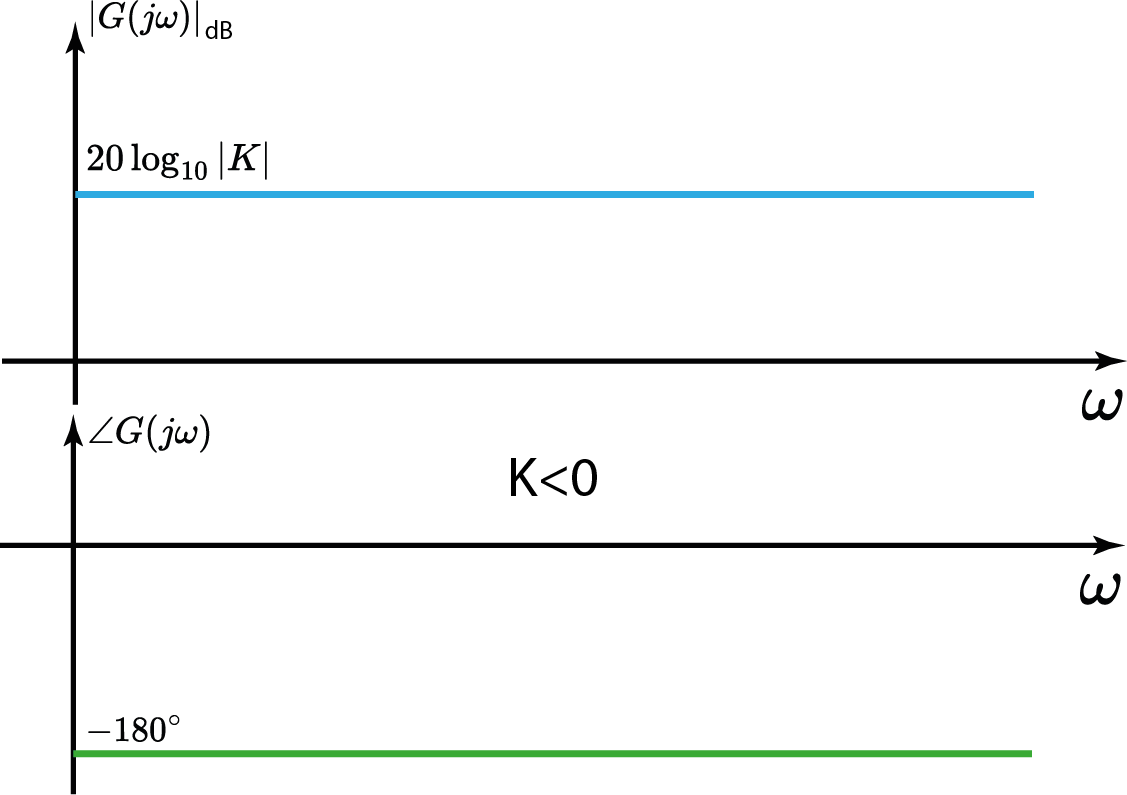
FT=(ganho)+(zeros/polos reais) + (zeros/polos conjugados)$$ G(s)=\frac{Y(s)}{X(s)}=K $$
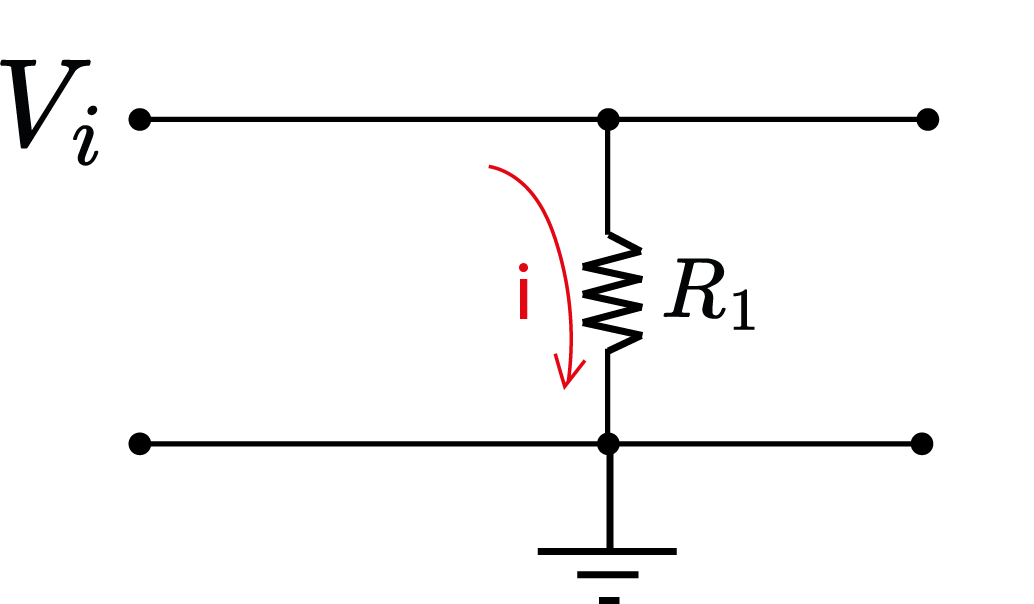
Resistor ideal

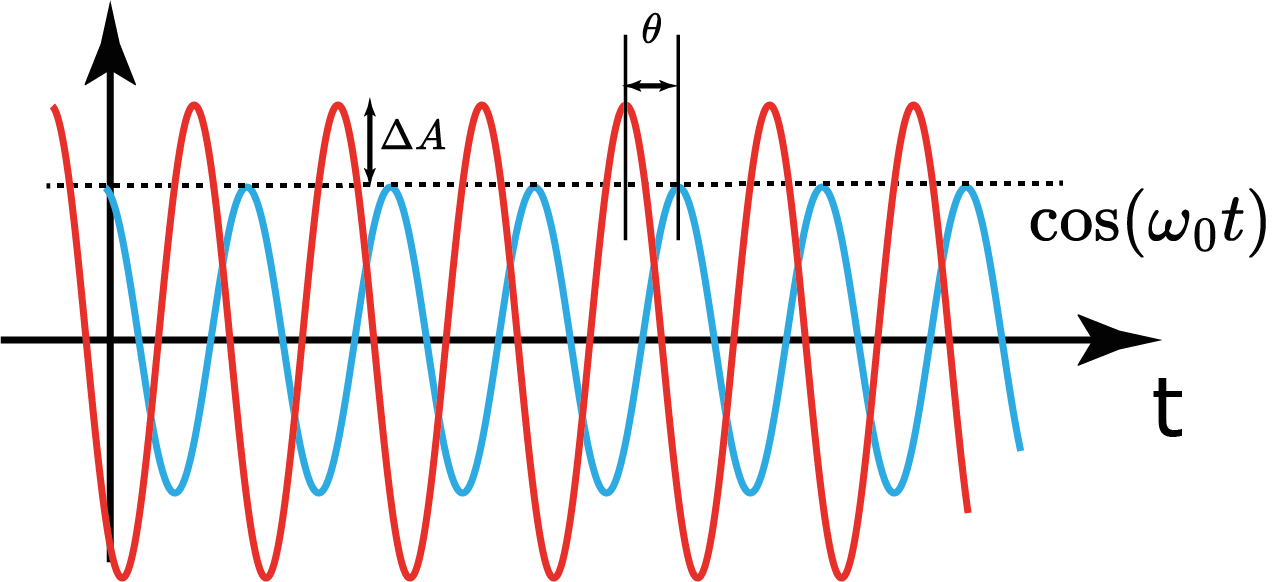
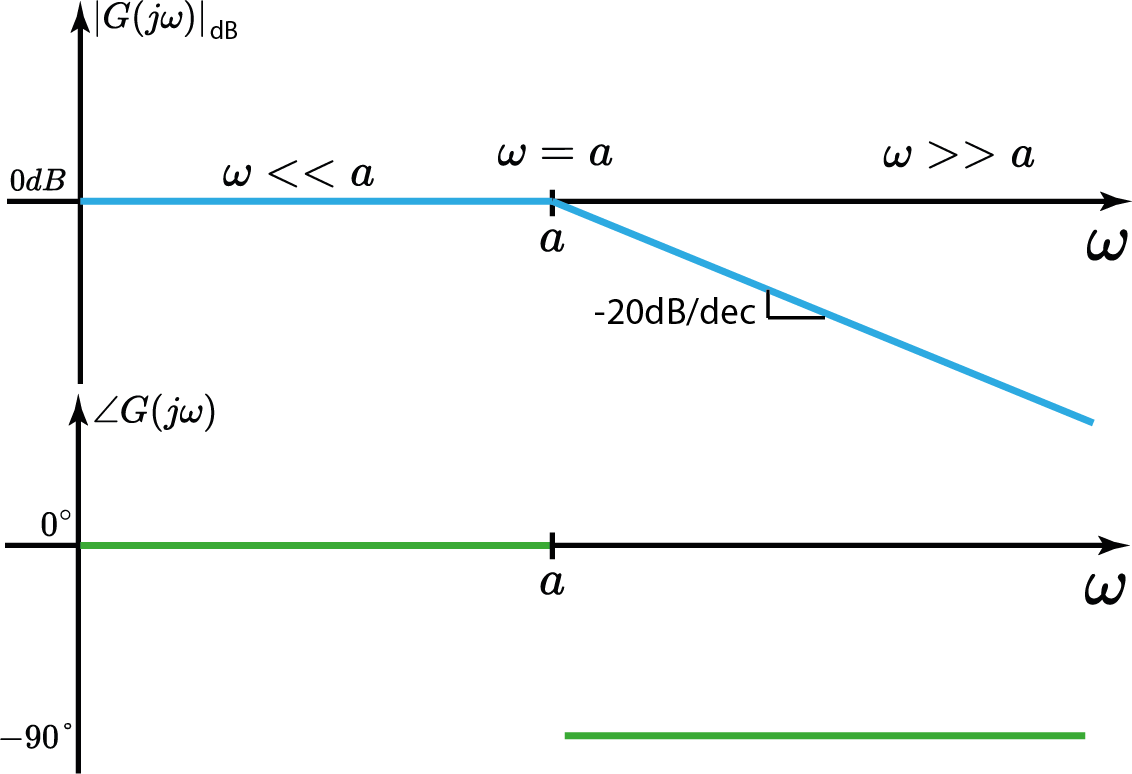
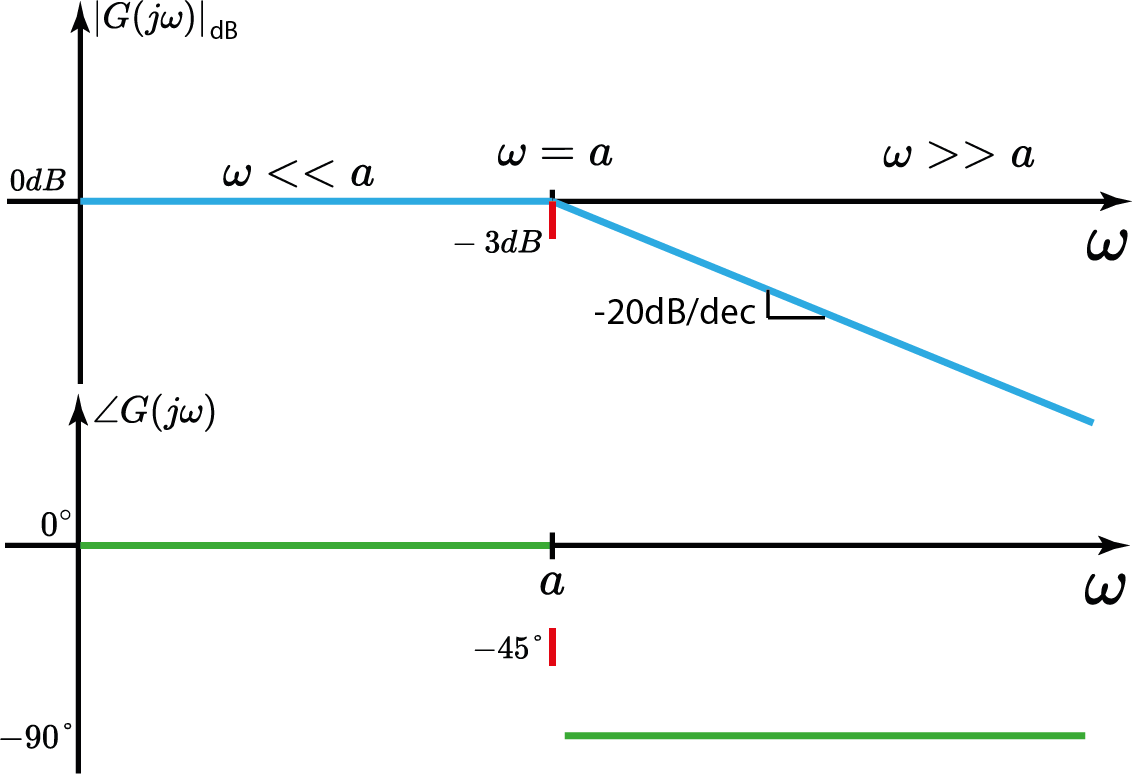
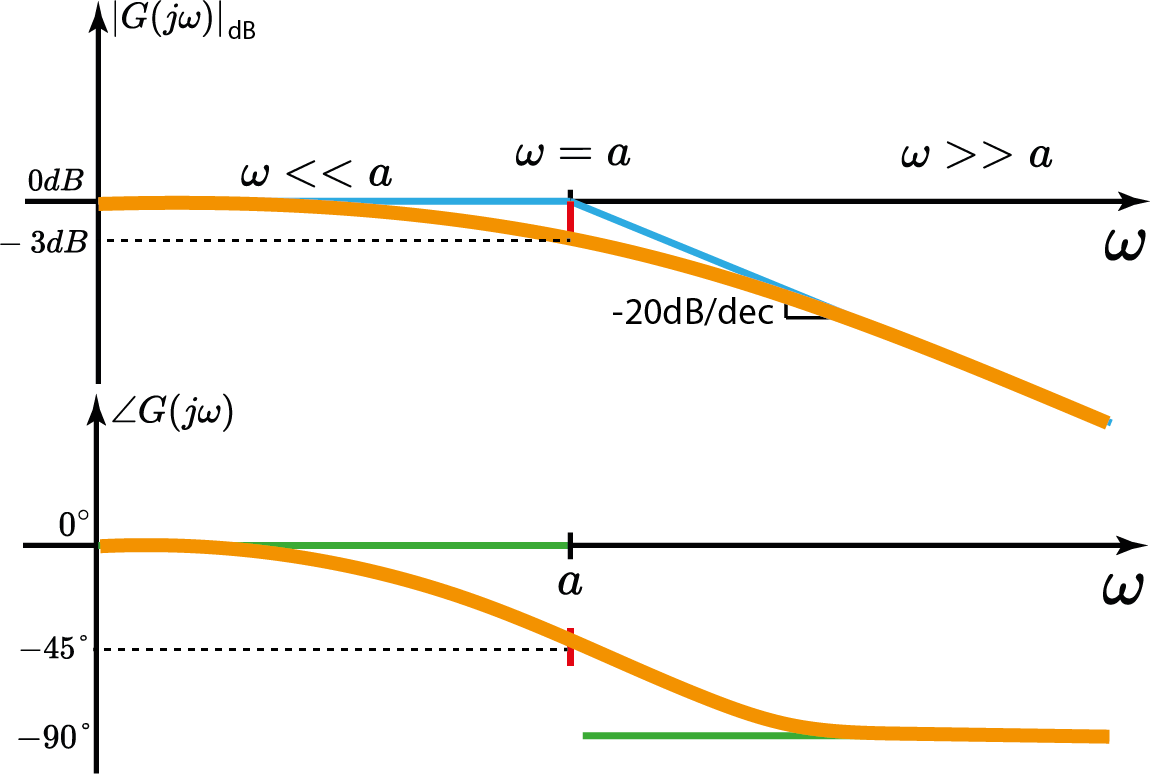
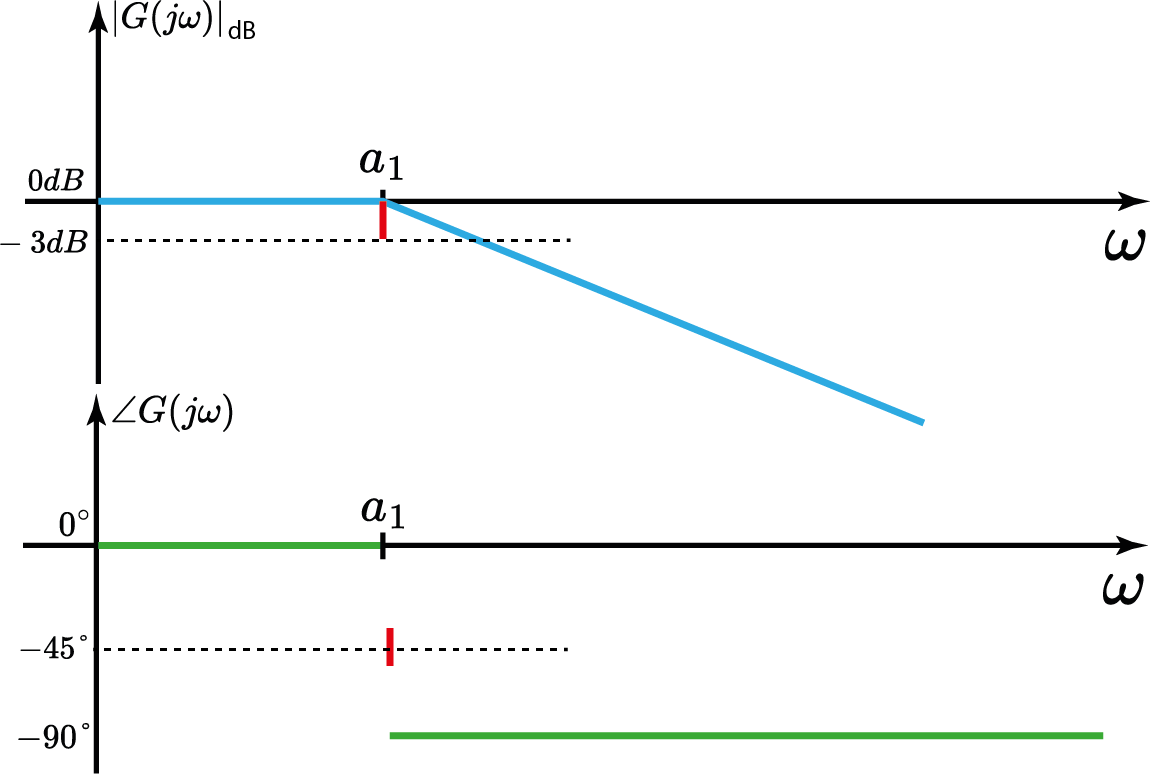
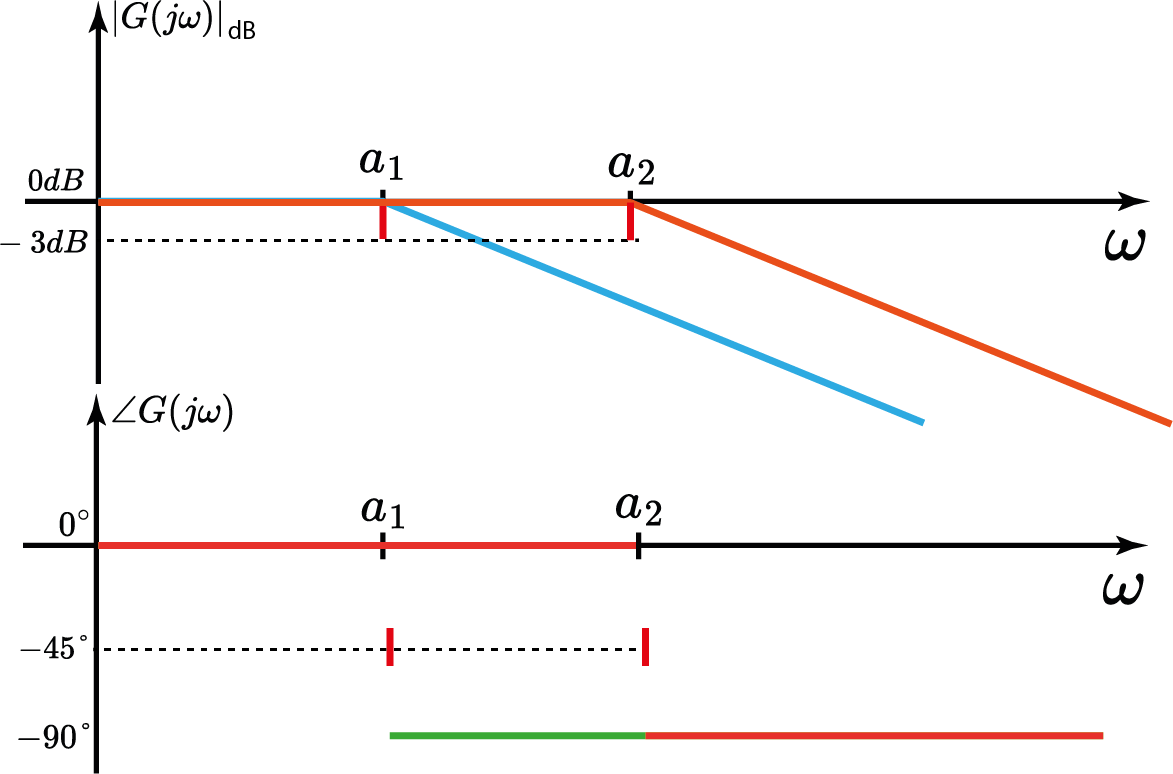
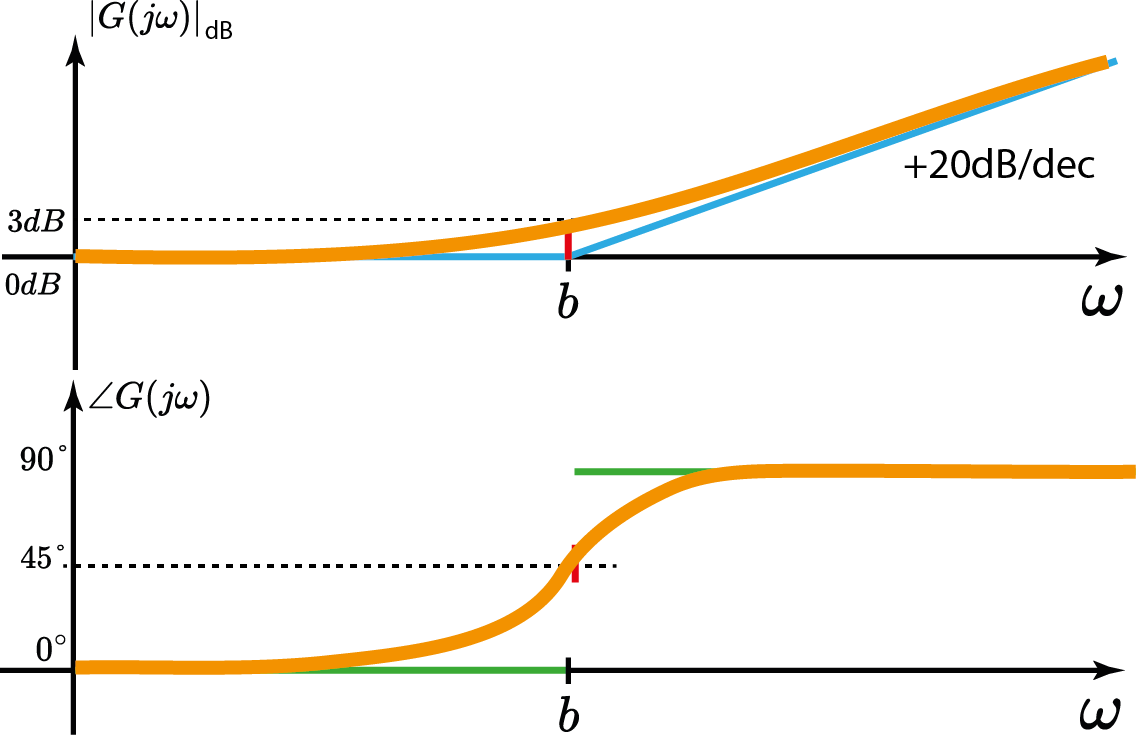
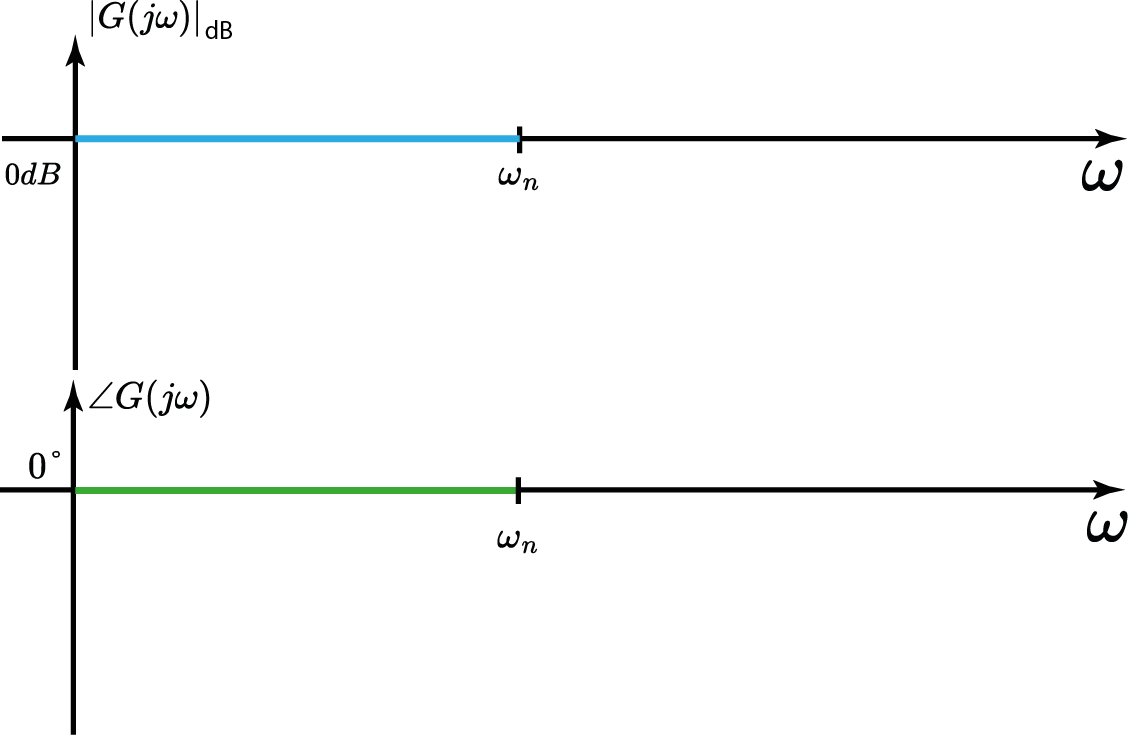
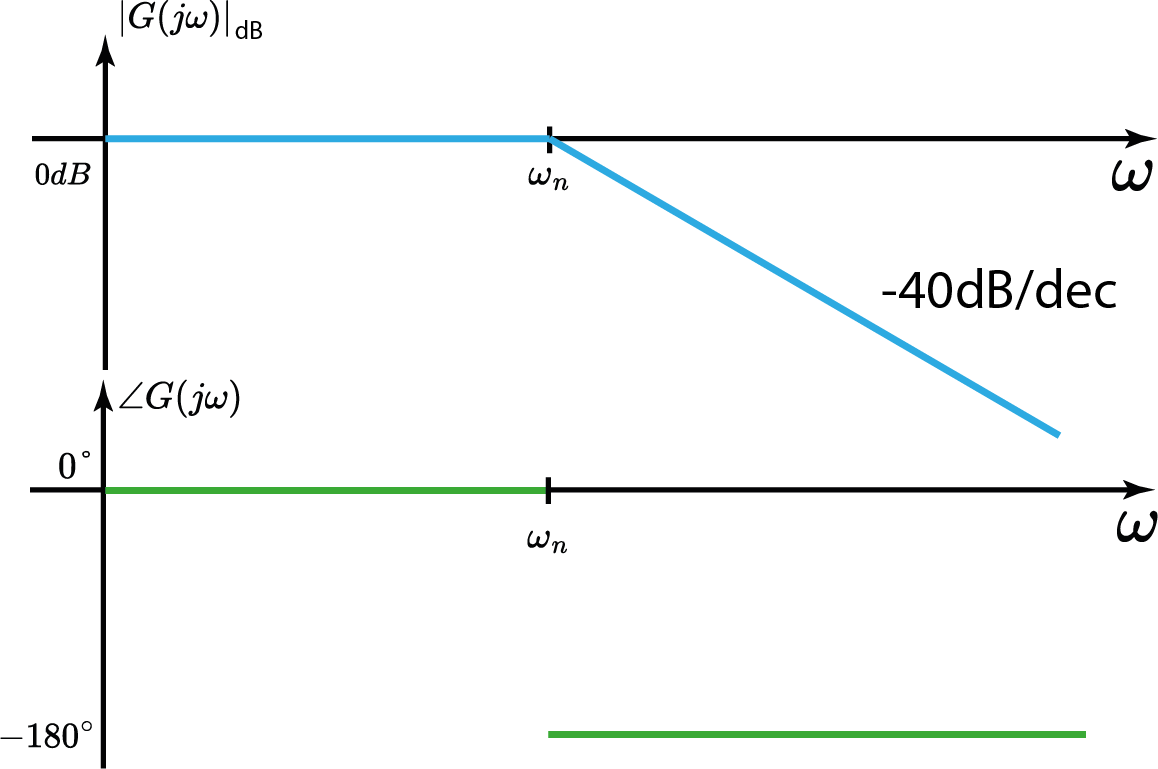
Módulo $|G(j\omega)|$ = ganho do sistema na frequência $\omega$!
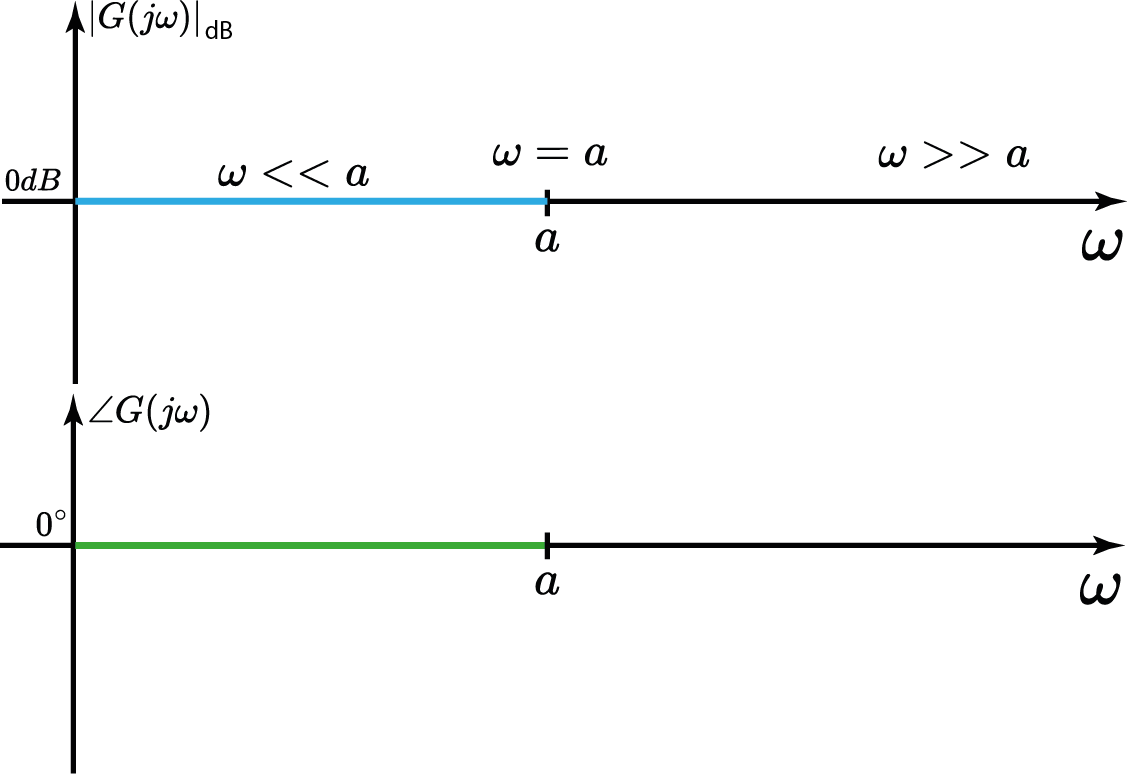
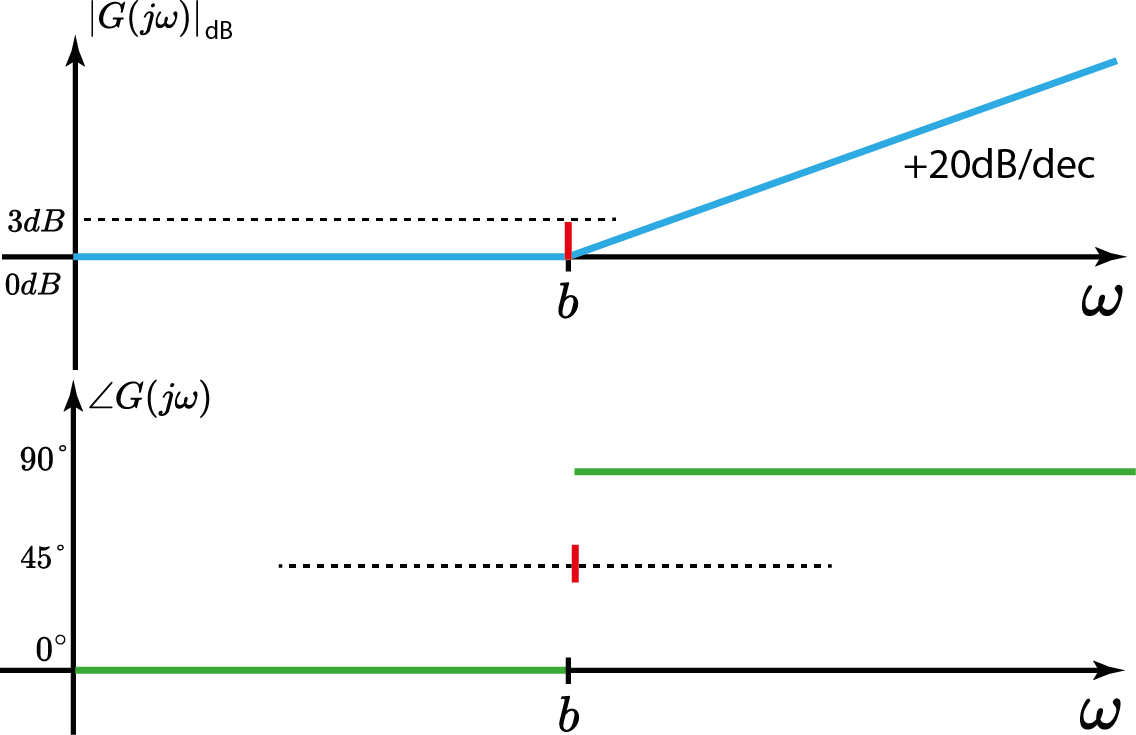
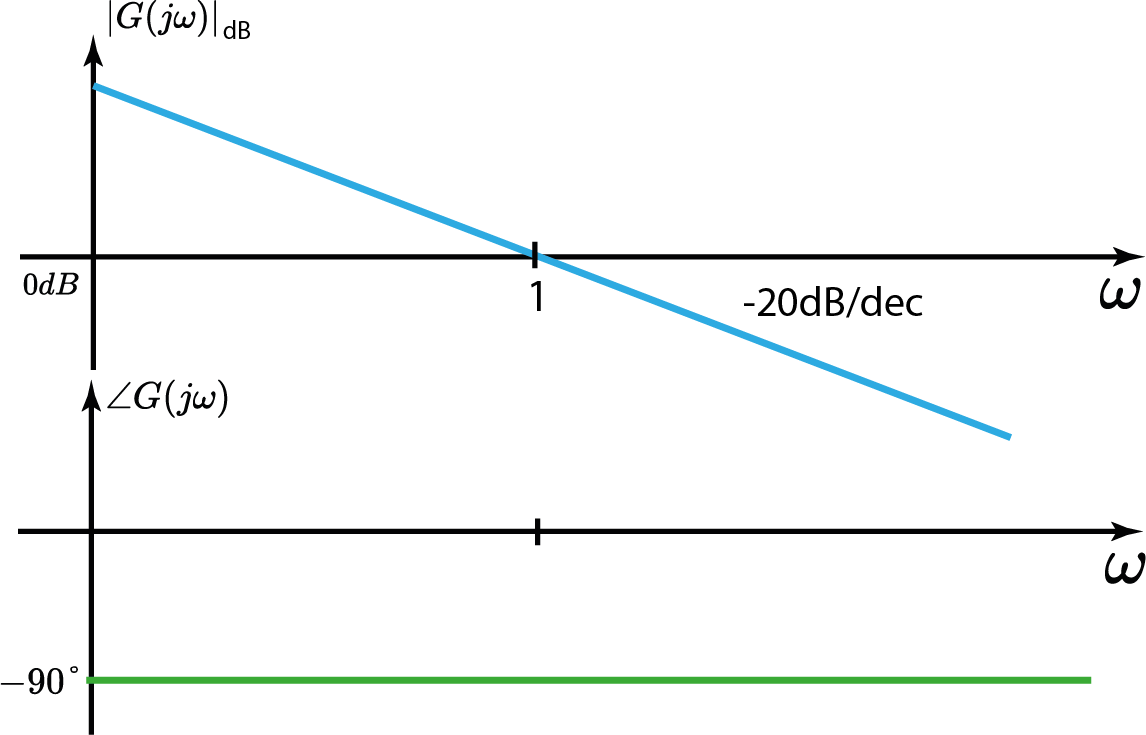
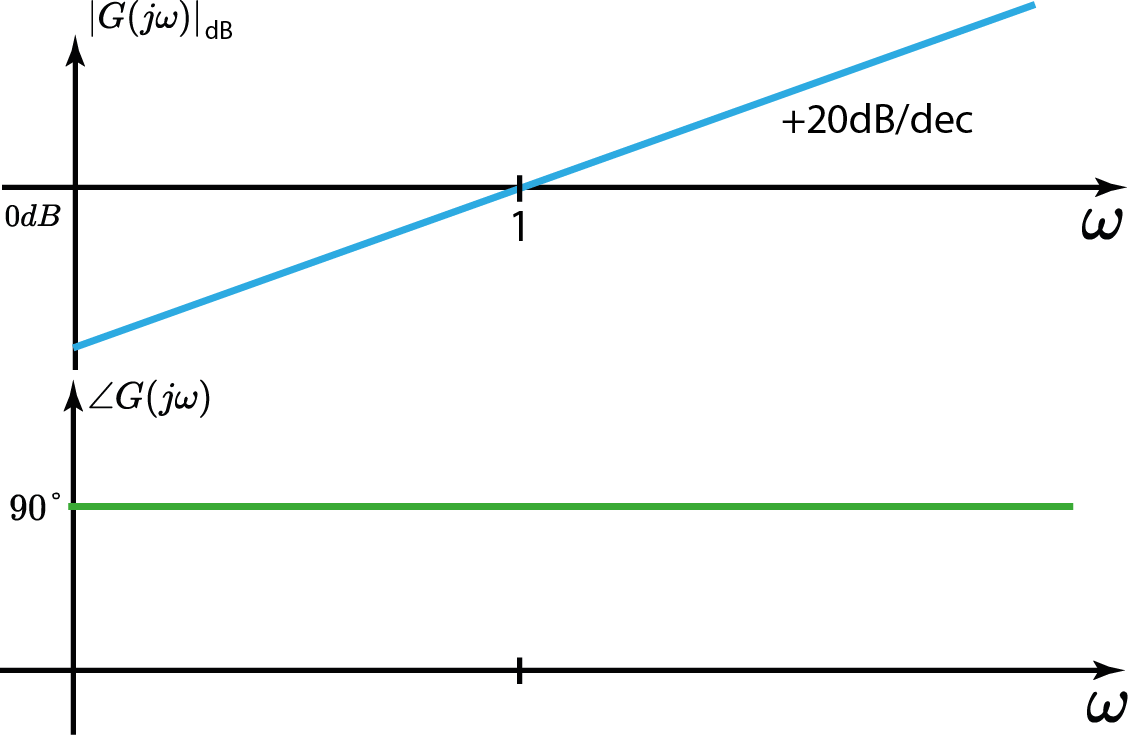
$$ G(s)=\frac{Y(s)}{X(s)}=\frac{1}{s+a} $$
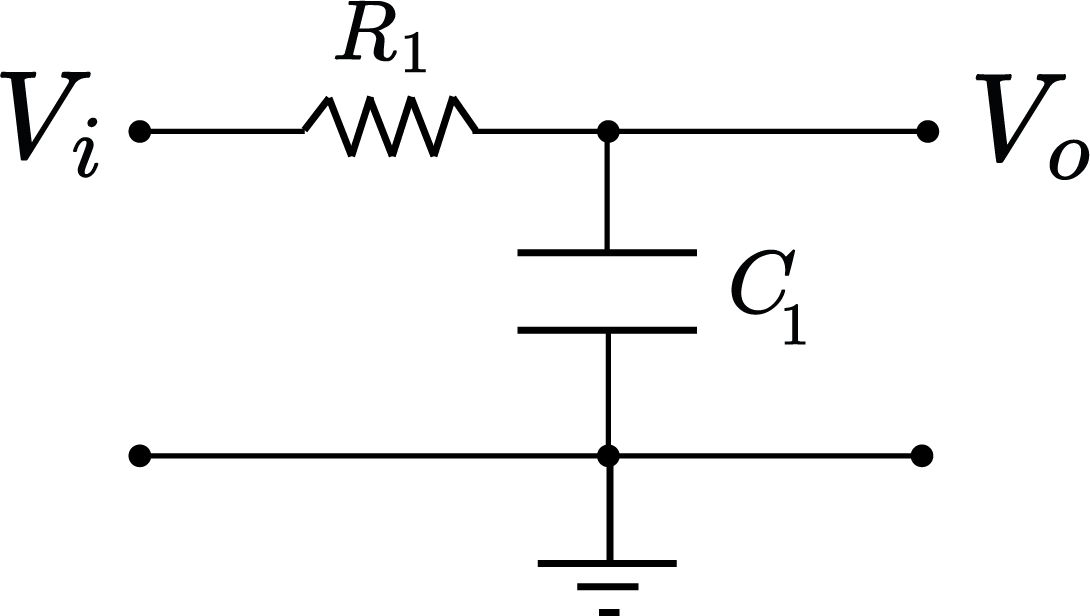
Circuito RC
$$ G(j\omega)=\frac{Y(j\omega)}{X(j\omega)}=\frac{1}{j\omega+a} $$
Circuito RC
$$ G(j\omega)=\frac{Y(j\omega)}{X(j\omega)}=\frac{\frac{1}{a}}{j\frac{\omega}{a}+1} $$
Circuito RC
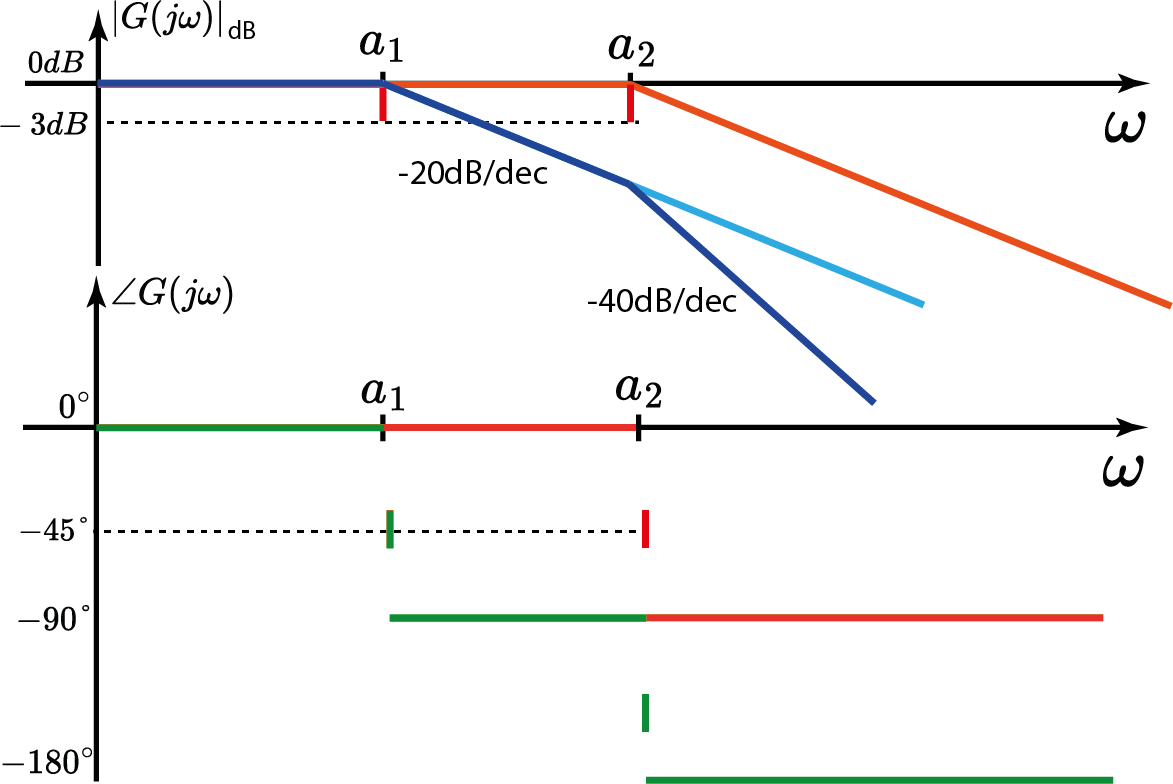
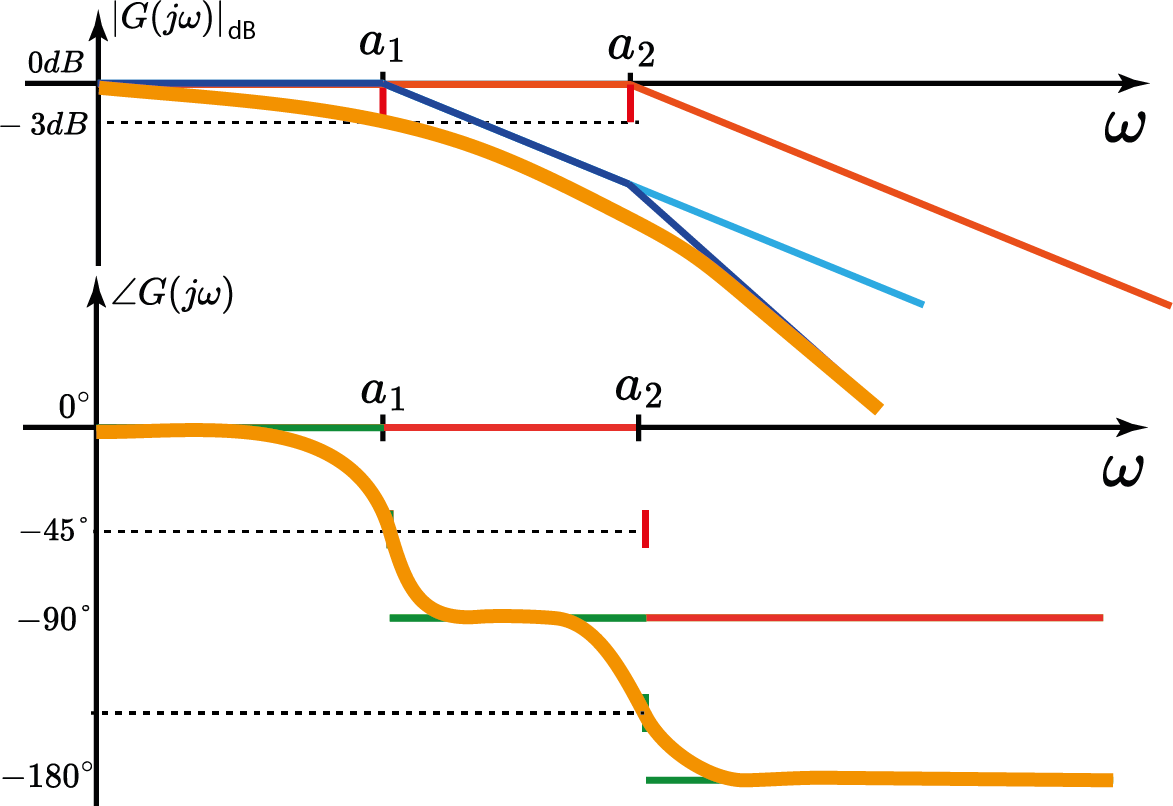
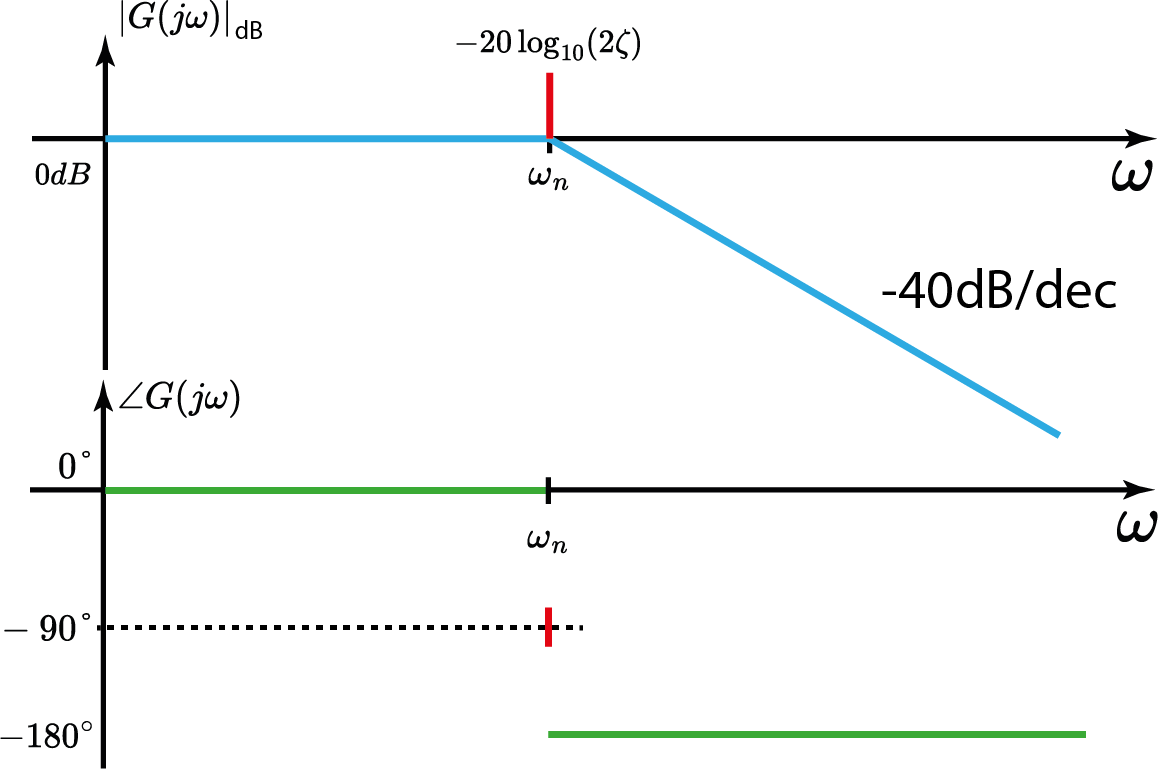
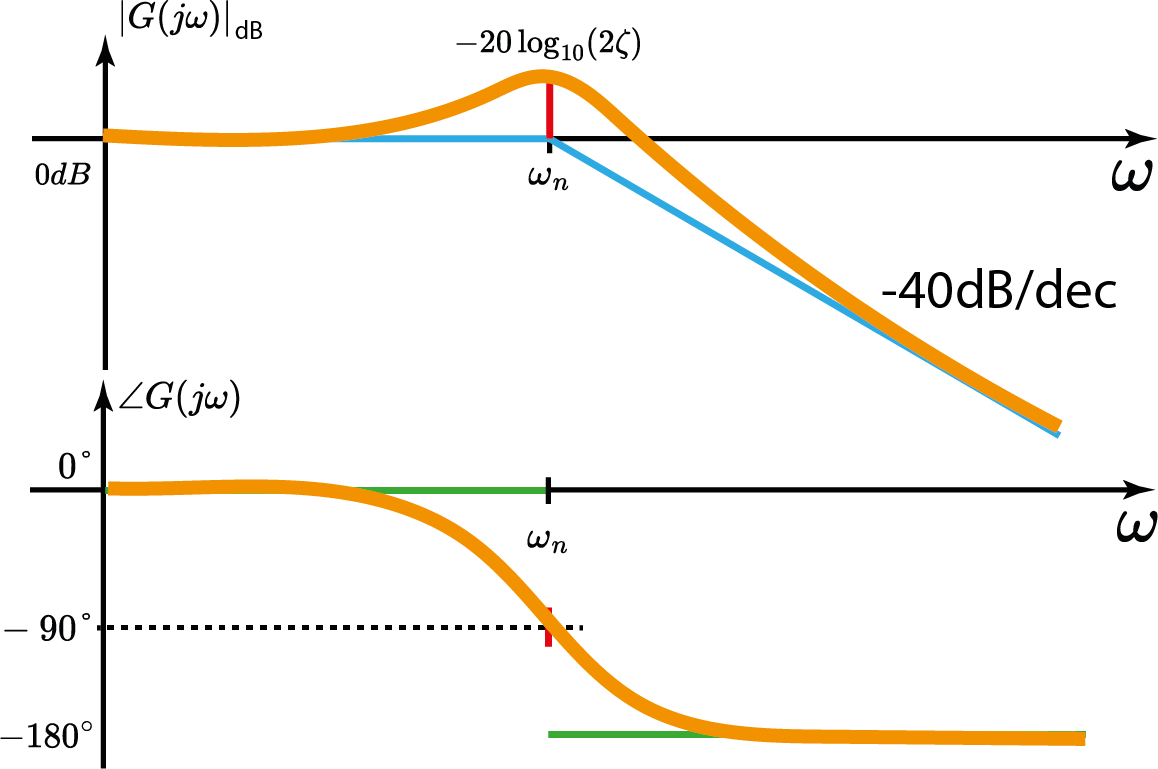
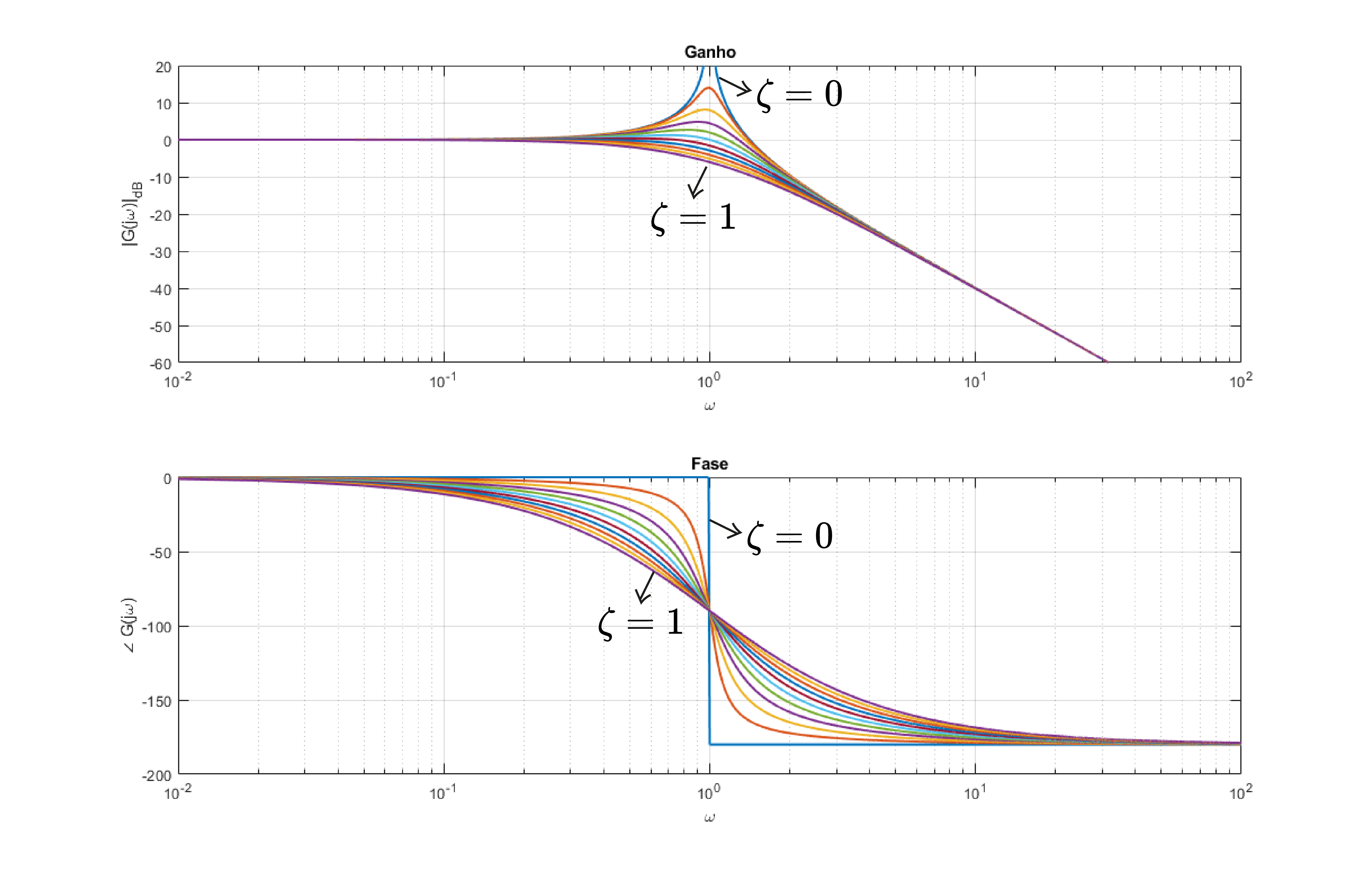
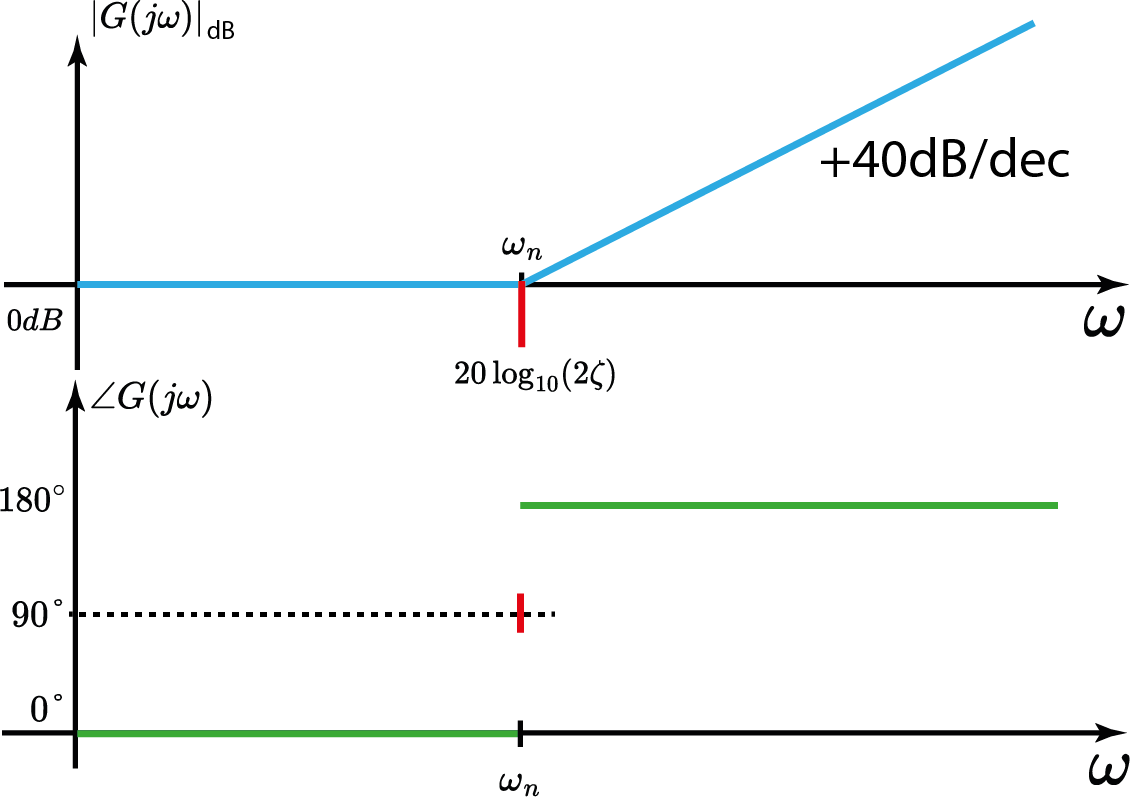
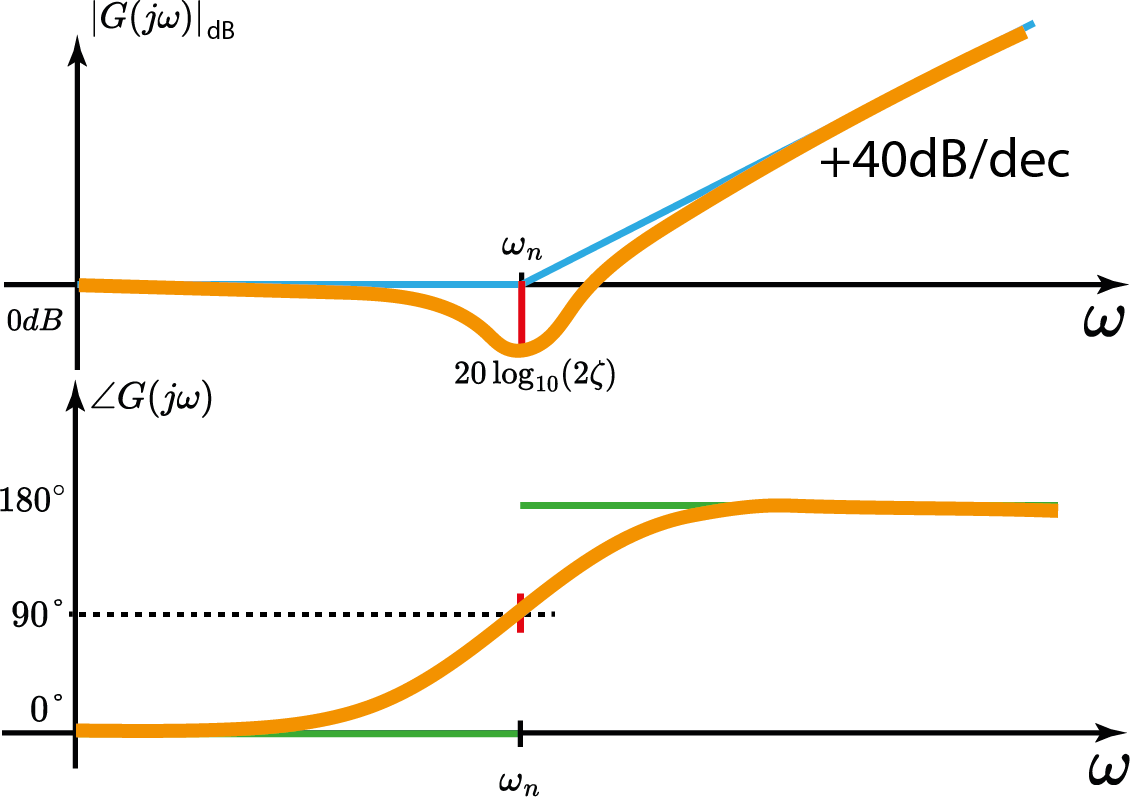
$$ G(s)=\frac{Y(s)}{X(s)}=\frac{1}{(s+p)(s+p^*)} $$
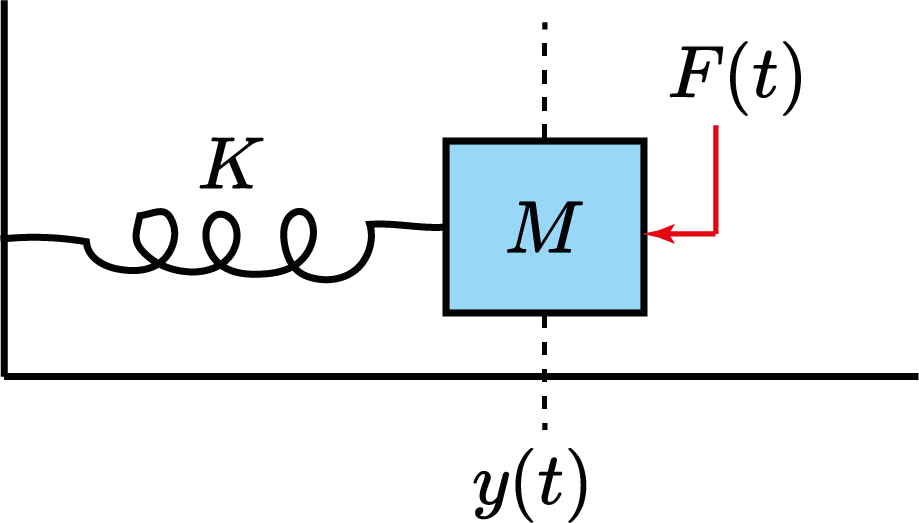
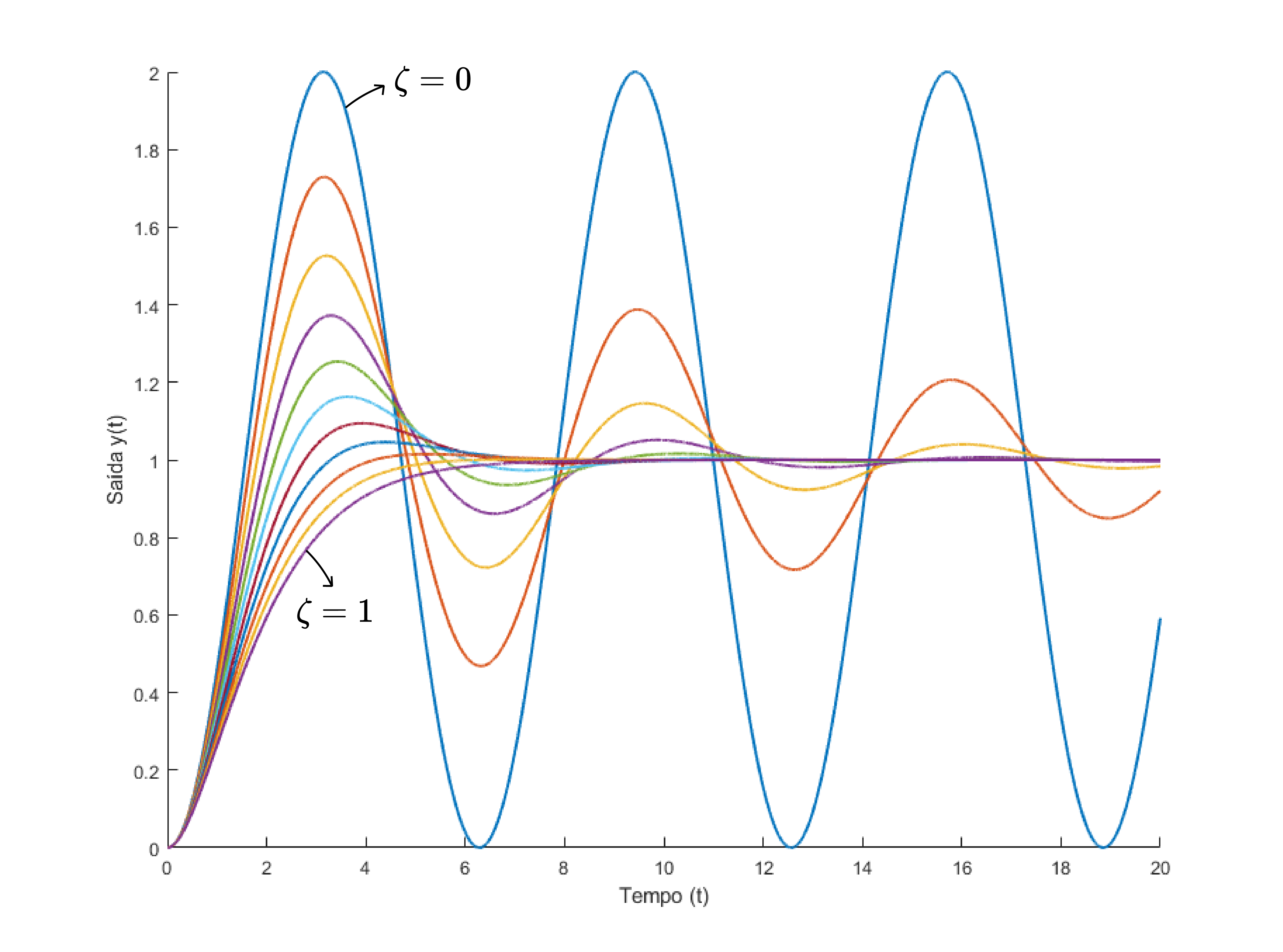
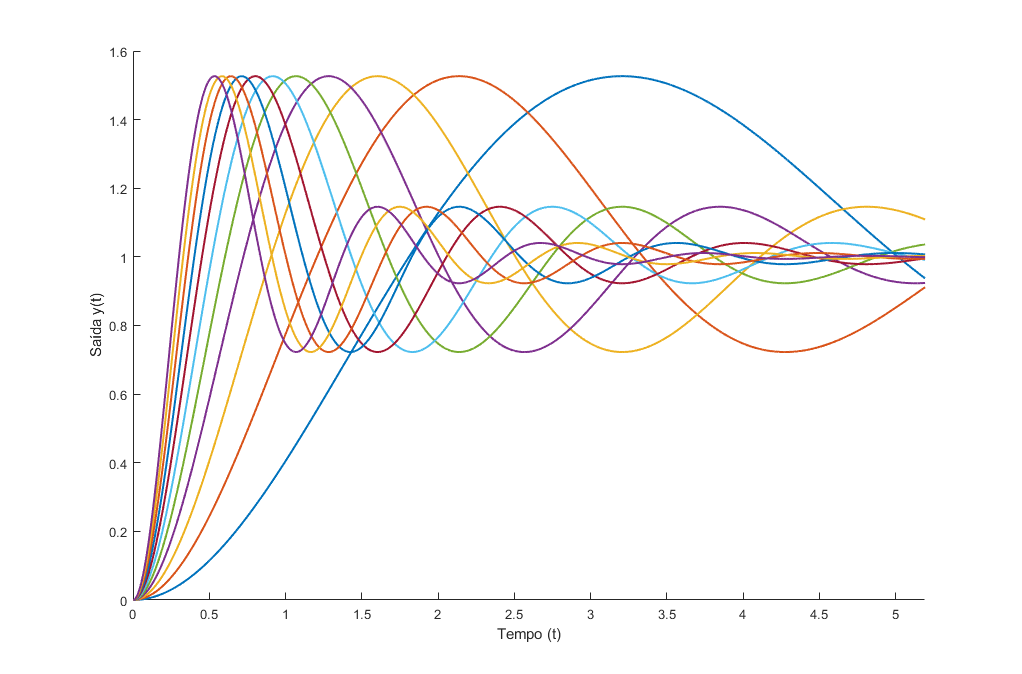
Massa-Mola
$$ G(s)=5\frac{s+1}{s+2}\frac{1}{s^2+2s+4} $$
- Qual o ganho do sistema em dB em função de $\omega$?
- Qual a fase do sistema em função de $\omega$?